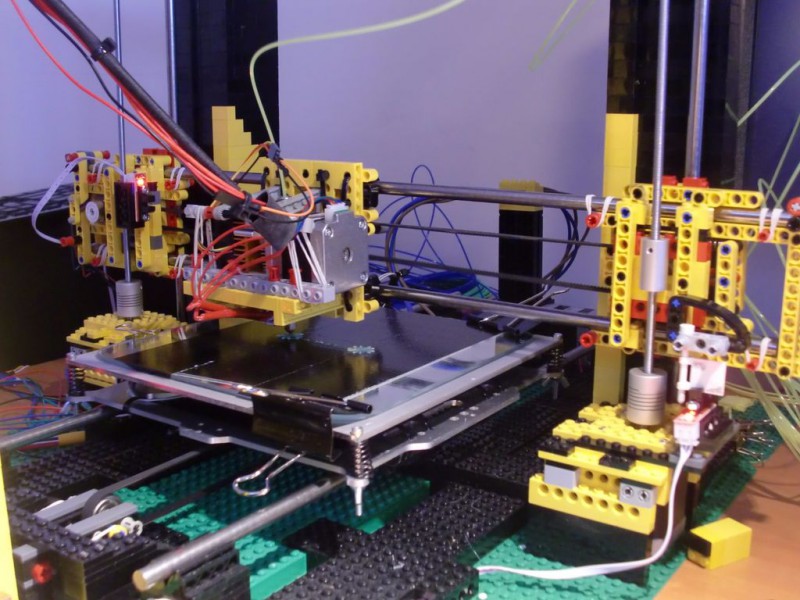
Доброго дня, мозгодрузья! Такая замечательная вещь как конструктор Lego вдохновила меня на создание своими руками 3D-принтера, а что из этого получилось читайте далее.
В основе этого Lego-принтера лежит модифицированный принтер Prusa I3. Изначально самоделка была плоттером формата А4 на шаговых двигателях от старого принтера, после замены которых на Nema 17, было решено добавить еще одну ось, так мозгоподелка и стала 3D принтером.
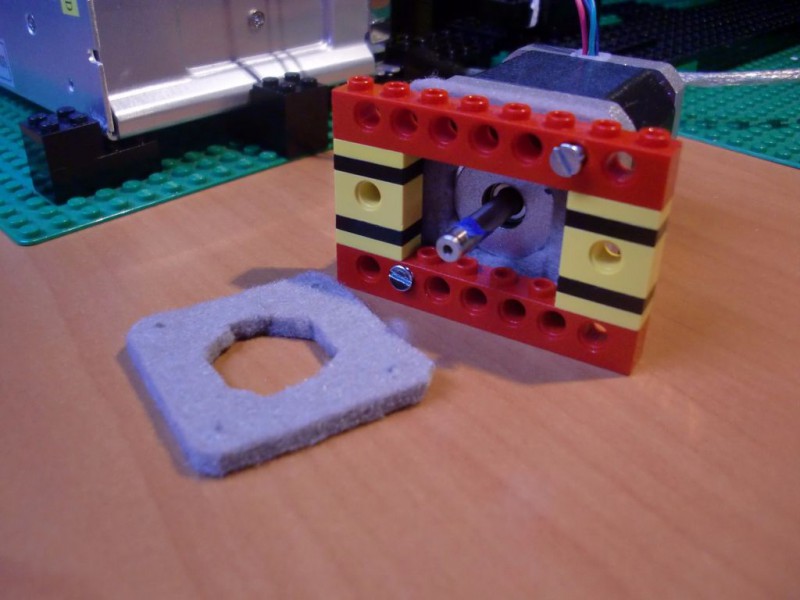
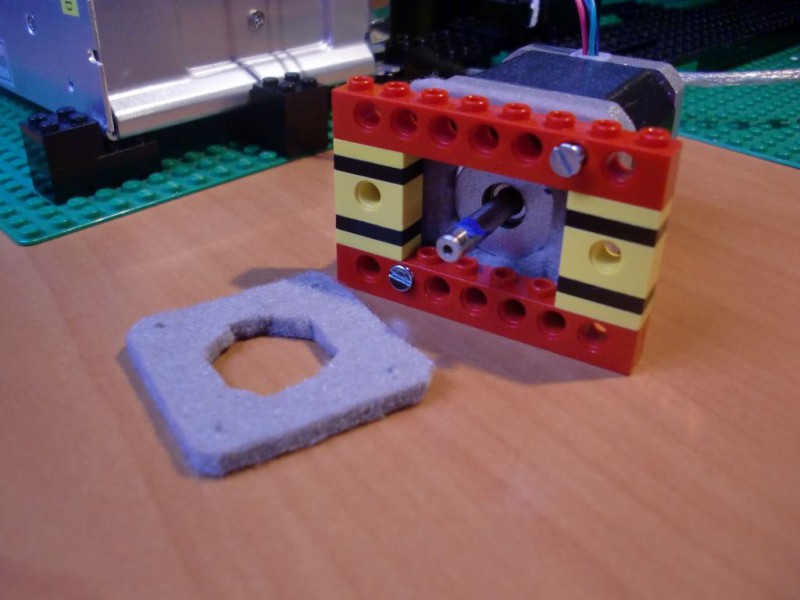
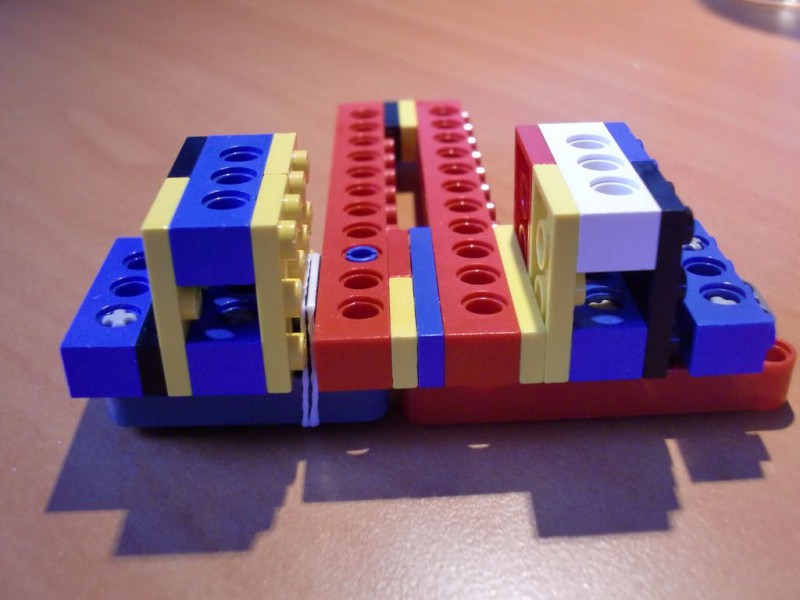
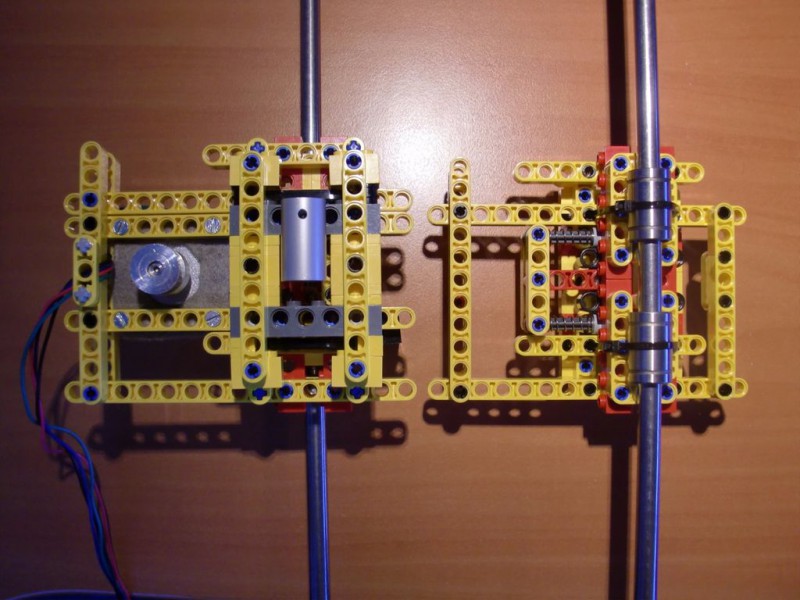
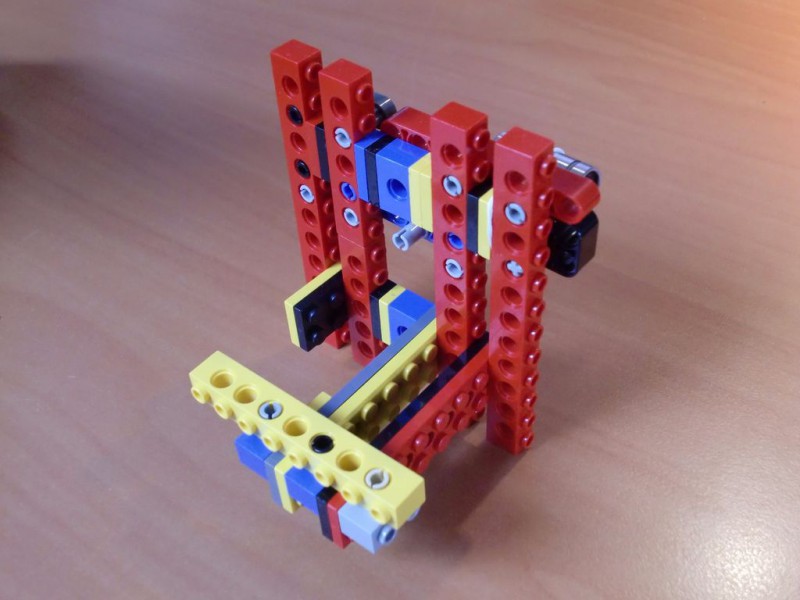
Приятным моментом было то, что блоки Lego и моторы Nema 17 идеально подходят друг к другу. Размеры блока 4х2 32х16х9,6мм, а моторы имеют отверстия М3 на расстоянии 31мм. Таким образом прикрепив моторы к Lego-конструкции с помощью уплотнителя на болты М3х15, получается прочная база-кронштейн (см. фото). Для сборки Lego-конструкций полезно руководство Lego Dimension Guide
Это мое первое мозгоруководство и оно не является окончательным руководством по созданию Lego-принтера, я привожу лишь основные моменты, и всю информацию для сборки этой самоделки я взял из сети.
!!! ВНИМАНИЕ: Несмотря на внешний вид этот 3D-принтер не игрушка! Не оставляйте без внимание работающий принтер, так как температура рабочего стола может достигать 110 градусов Цельсия, а температура печатающей головки только начинается со 170 градусов Цельсия! Поэтому будьте осторожны при работе с принтером!
Шаг 1: Материалы
Данная поделка не состоит на 100% из Lego деталей, у меня просто нет достаточного количества деталей серии Mindstorms, да еще Lego используют сервомоторы, а в 3D-принтерах применяются шаговые двигатели. И последней причиной является софт используемый для управления принтером: я пользуюсь Marlin для Atmega 2560 и Pronterface установленный на мозгоноутбуке.
Помимо большого количества Lego-блоков понадобятся несколько компонентов из Prusa i3. Стержни, в зависимости от габаритов вашего принтера, лучше приобрести по 100см, чем использовать имеющиеся в Prusa i3.
Стержни и компоненты:
— гладкий стержень 8мм 100см — 3шт.
— резьбовой стержень M5 100см
— линейный подшипник LM8UU — 11шт.
— шариковый подшипник 608 — 2шт.
— гибкая муфта 5×5 — 2шт.
— шаговый двигатель Nema 17 — 4шт.
— шкив GT2 — 2шт.
— ремень GT2 — 200см
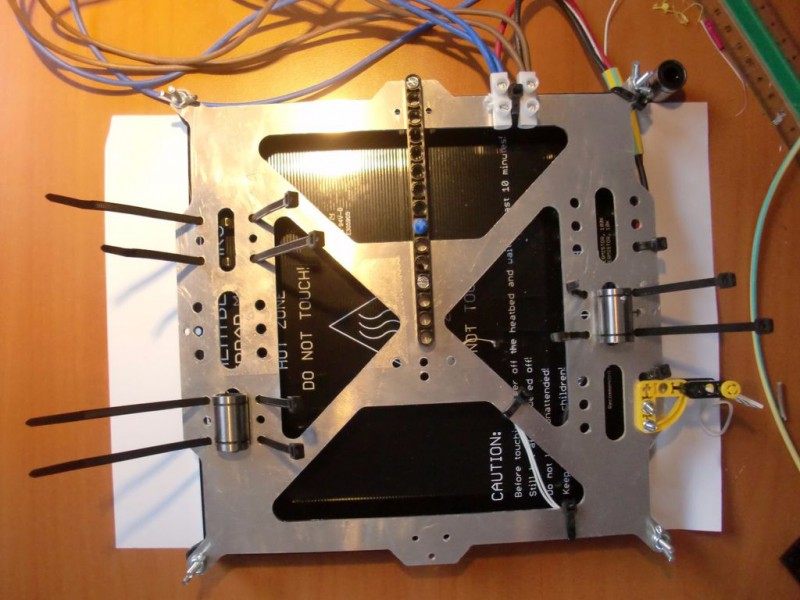
Рабочий стол:
— Y-разный каркас (можно использовать Lego)
— рабочая поверхность
— стеклянная поверхность
— термистор 100кОм
— канцелярские зажимы — 4шт.
Электронные компоненты:
— плата Ramps
— ATmega 2560
— драйвер шагового двигателя Stepstick — 4шт.
— концевые выключатели -3шт.
— блок питания
— набор проводов и кабелей для Ramps — 1шт.
— экструдер с Nema редуктором (1x)
А также болты, гайки и шайбы в зависимости от выбранной комплектации. К примеру, шаговые двигатели к Lego-конструкциям лучше крепить болтами М3х15.
Шаг 2: Ось Y — двигатель и ремень
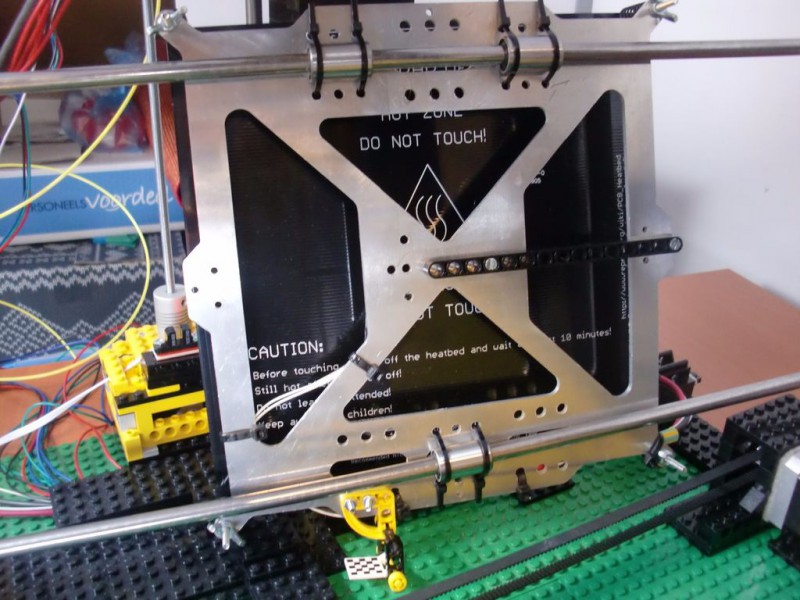


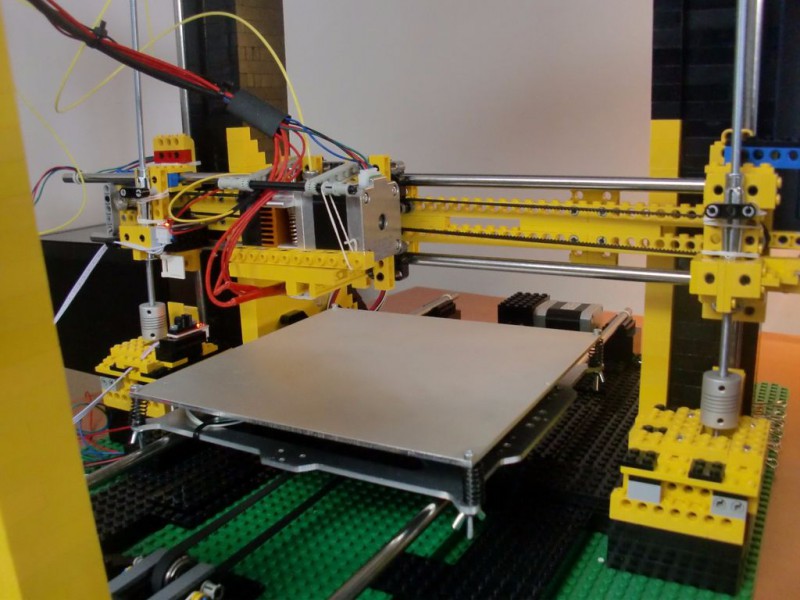
Строительство принтера начинается со сборки основания и основание этой самоделки насчитывает по сторонам 34х64 шипов или 19,2х51,2см., и является серединой в общей базе площадью 56х64 шипов.
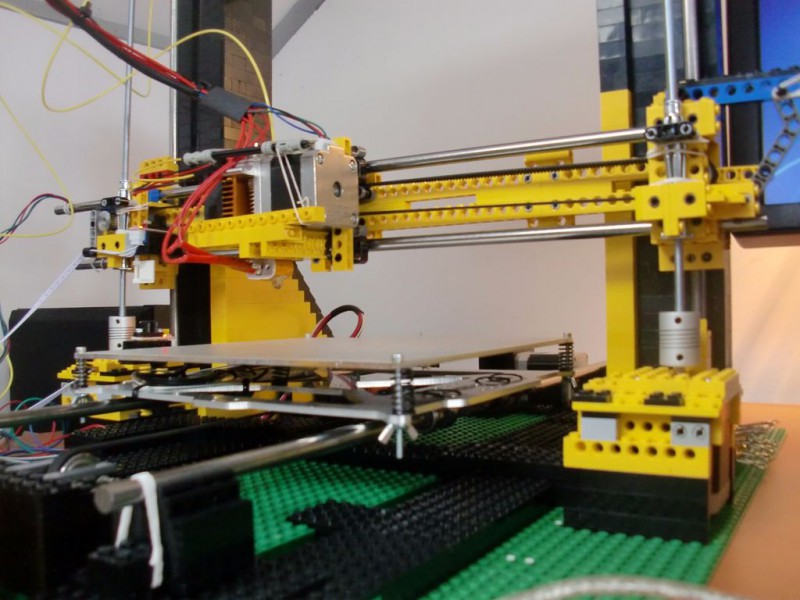
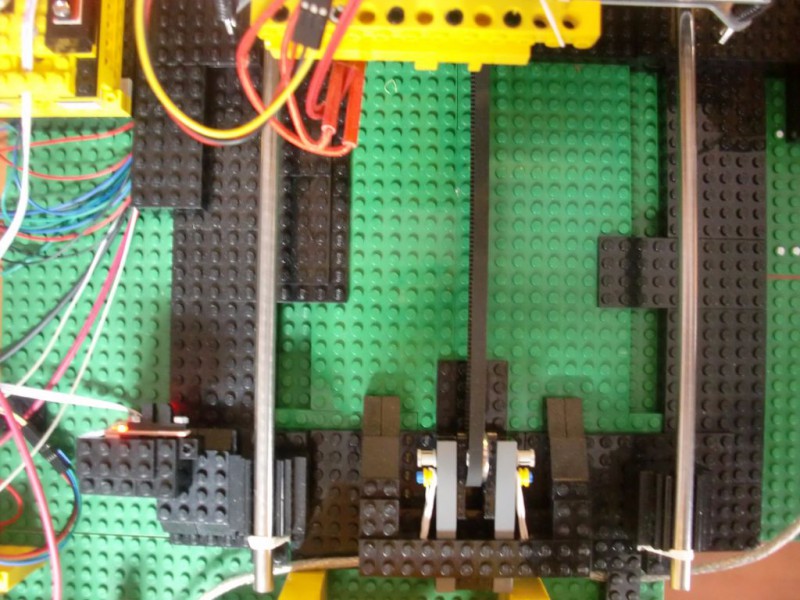
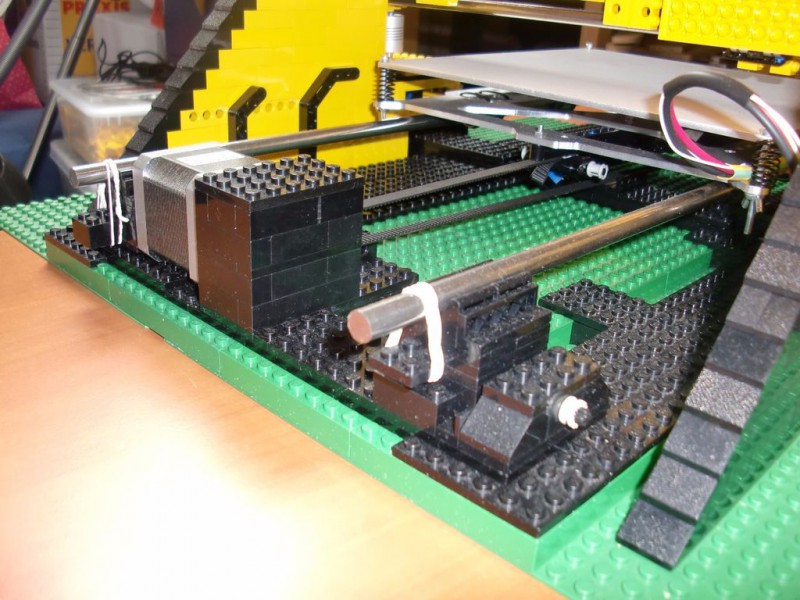
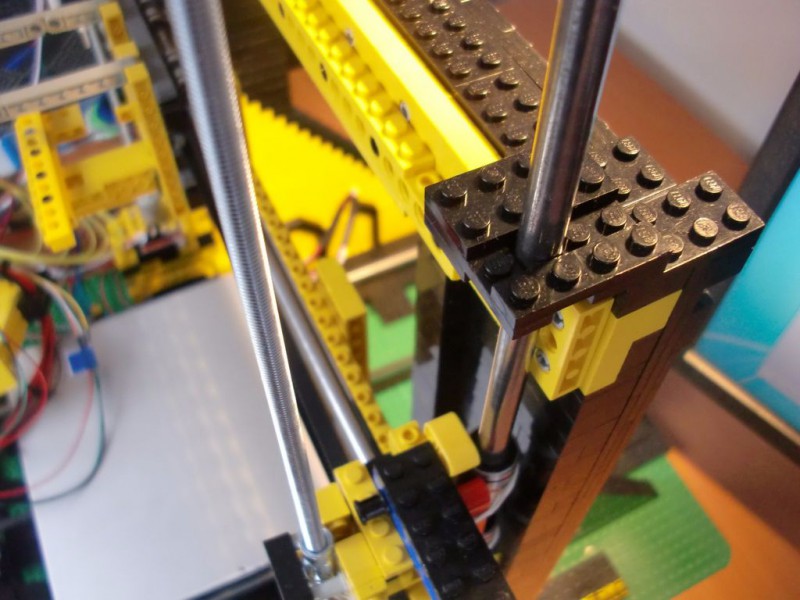
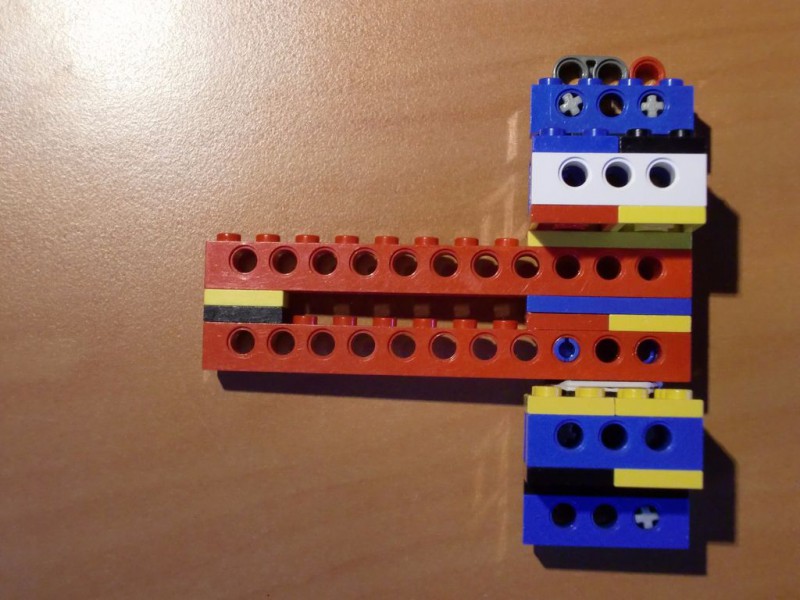
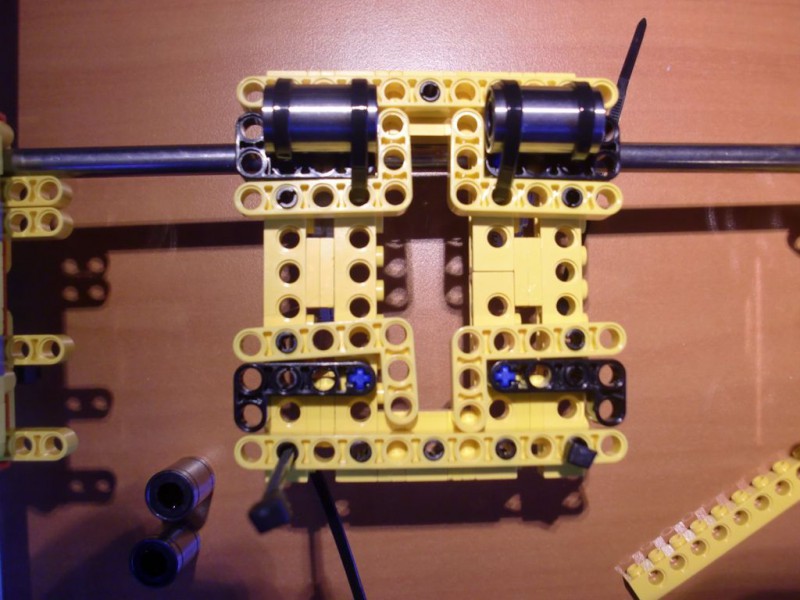
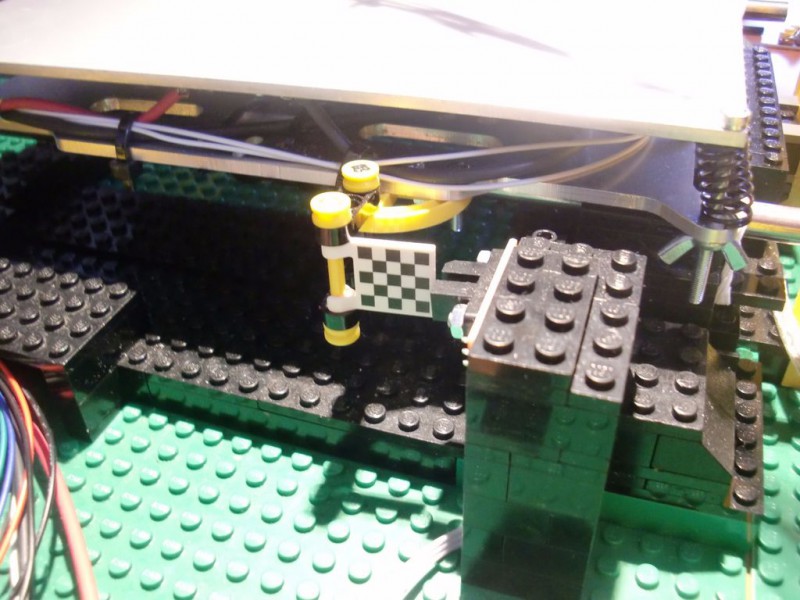
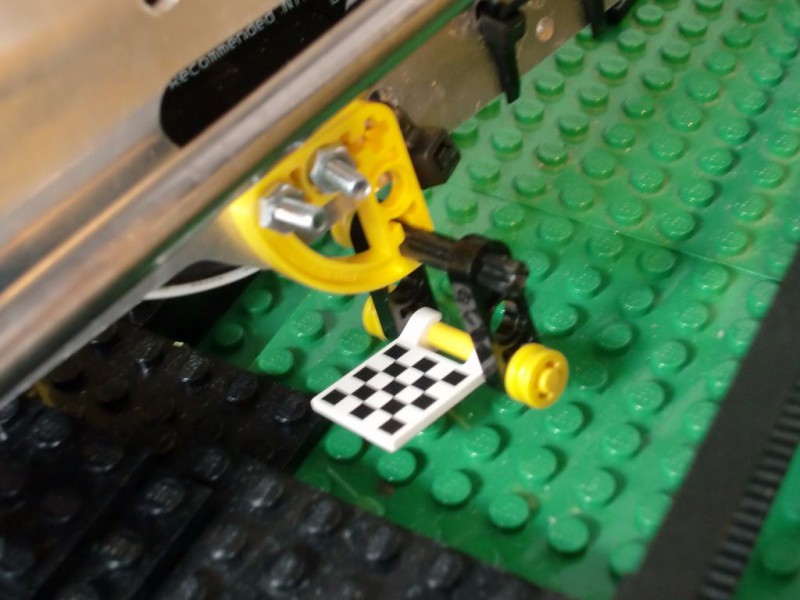
После создания основания определяем расстояние для установки направляющих стержней оси Y. Y-образный каркас размещается посредством подшипников LM8UU на расстоянии 170мм. Это занимает 21,25 шипа, где 1/4 шипа получается за счет детали «забор» используемой для крепления направляющих (см. второе фото). Также в креплении применяются четыре Lego-детали «кирпич с поручнем», которые размещаются напротив друг друга (см. третье фото). Общая высота крепления составляет 4 кирпичика (каретка движется выше шагового двигателя), сами направляющие длиной 50см и крепятся хомутами (последние два фото).
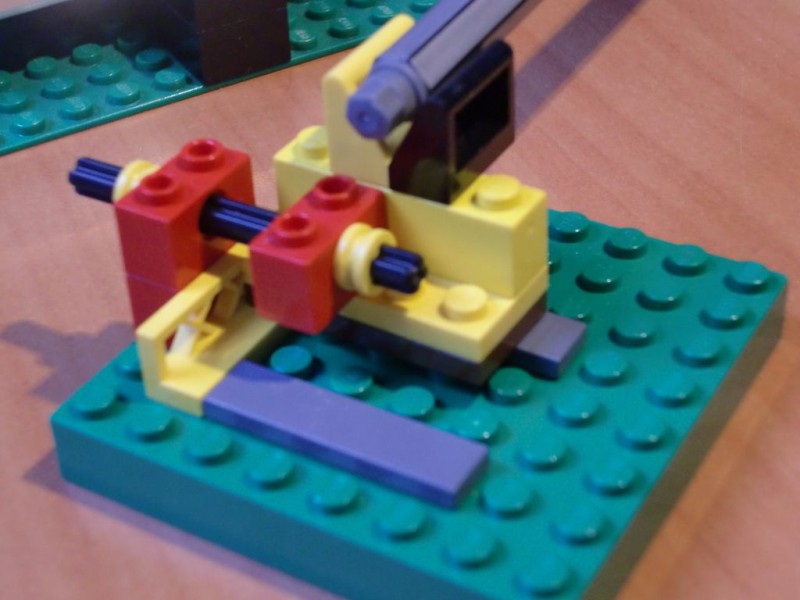
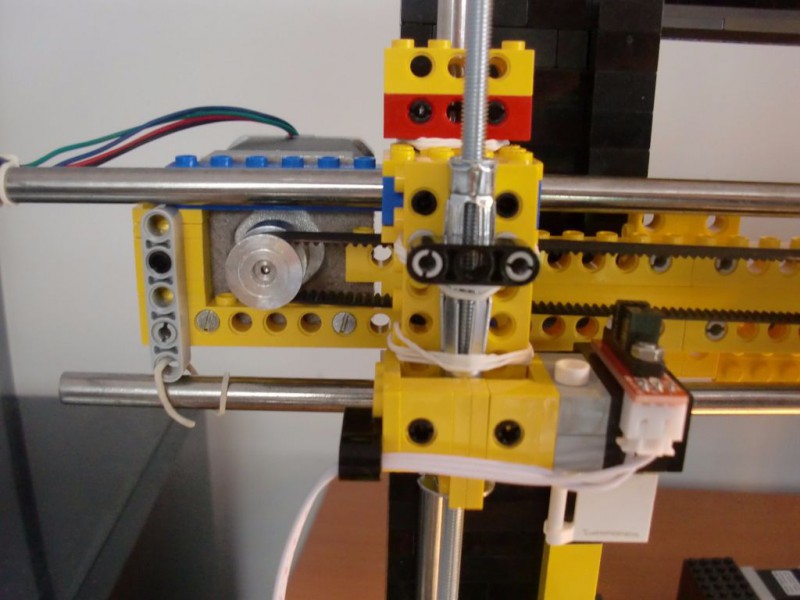
Шаговый двигатель размещен с задней части мозгоподелки с помощью технических кирпичиков, на его вал установлен шкив. Кронштейн подшипника регулируемый, то есть с помощью резинок можно произвести натяжку зубчатого ремня (четвертое фото). Сами резинки крепятся на кронштейн после установки ремня на каретку.
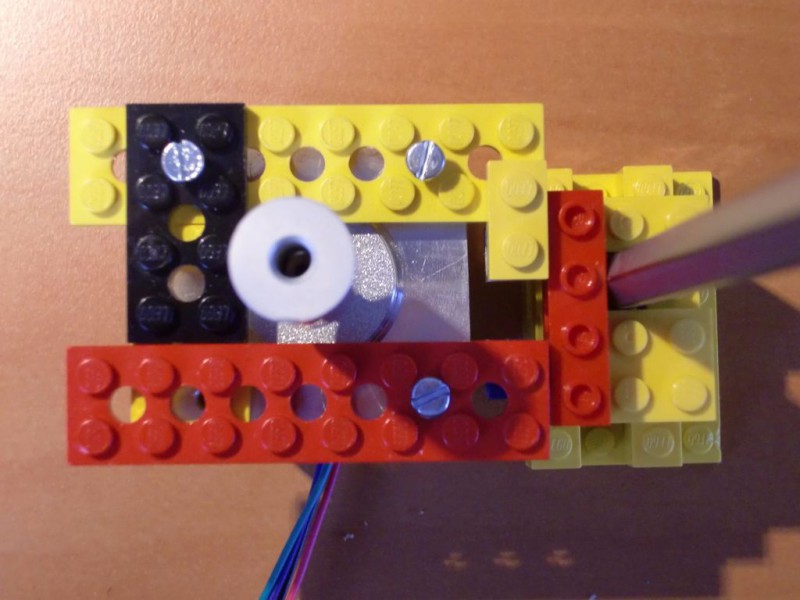
Зубчатый ремень соединен с Lego-кареткой, в которой два синих штырька служат для установки Y-образной рамки (первое фото).
Шаг 3: Ось Z — двигатель и резьбовой стержень
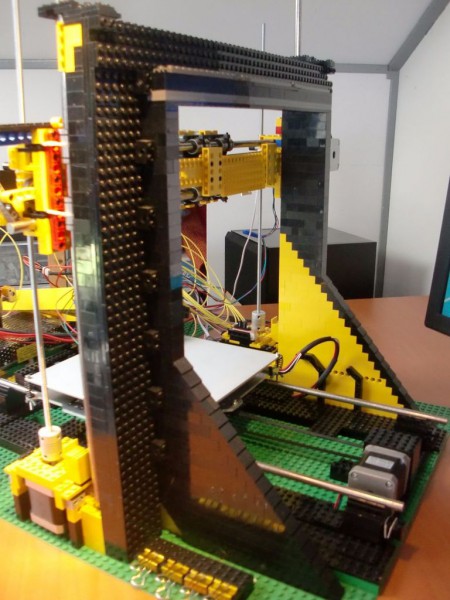
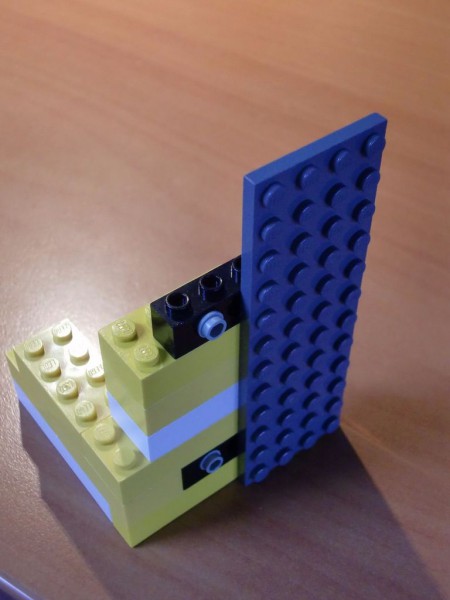
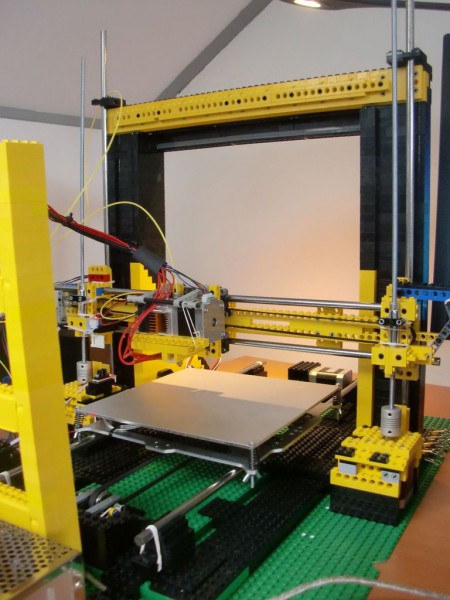
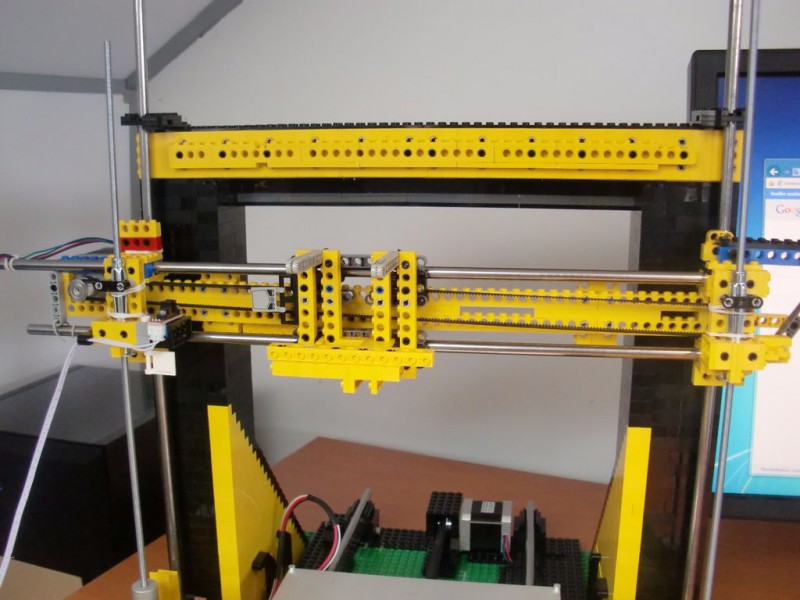
После сборки оси Y начинается сборка рамки. Общая высота принтера 44 кирпичика или 42см. Итак, сначала собираются две прочных L-образных стойки высотой в 36 кирпичиков, эта высота определяет максимально возможную высоту распечатываемой мозгофигуры. Слишком высокую рамку собирать не стоит, так как это снижает прочность рамки. Для строительства этих стоек применяются технические кирпичики, каждый пятый ряд из модифицированных кирпичиков, а для жесткости все связывается пластинами (второе фото). После сборки стоек они связываются между собой по верхнему краю.
Кстати, рамку можно сделать из дерева или листового акрила.
Стержень толщиной 8мм и длиной 50см можно разместить в пространстве 1х1см, Lego-блоки 1х1 как раз точно соответствуют 8-мм. Из-за размеров экструдера сам стержень размещен спереди, на 36-м шипе основания, а не по середине.
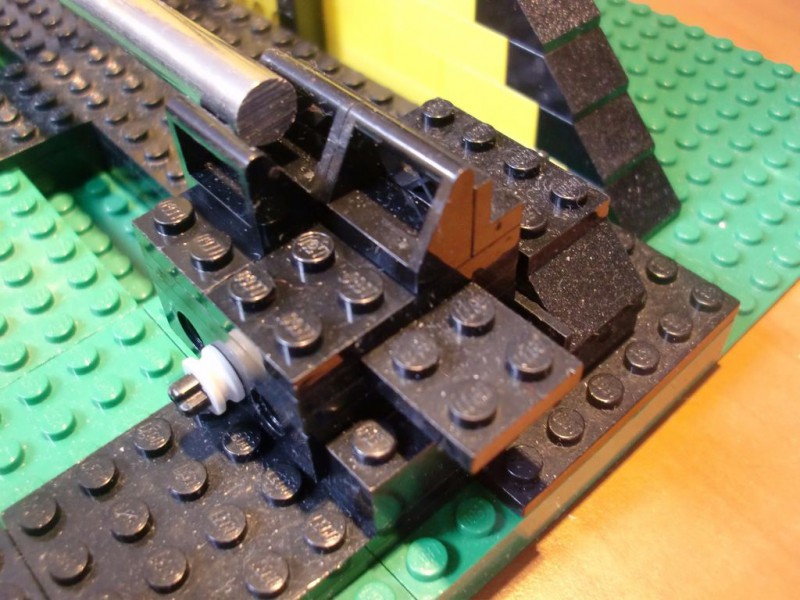
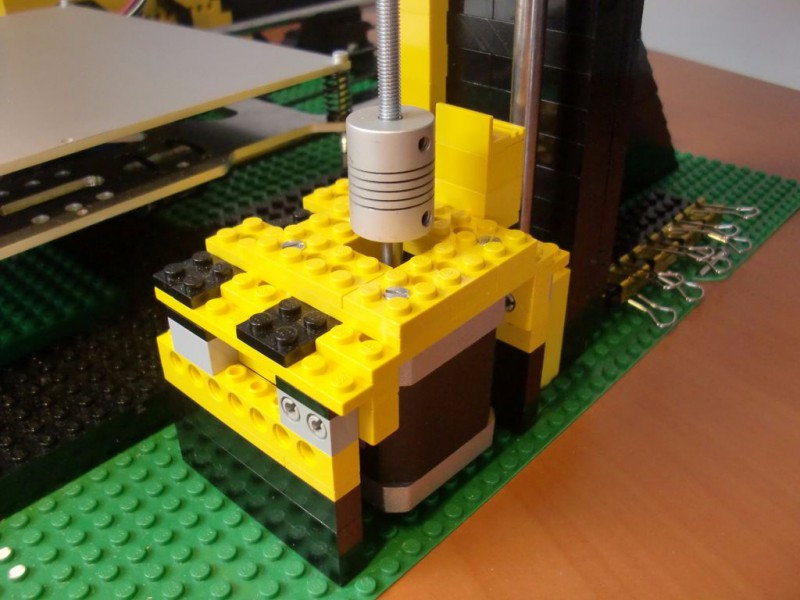
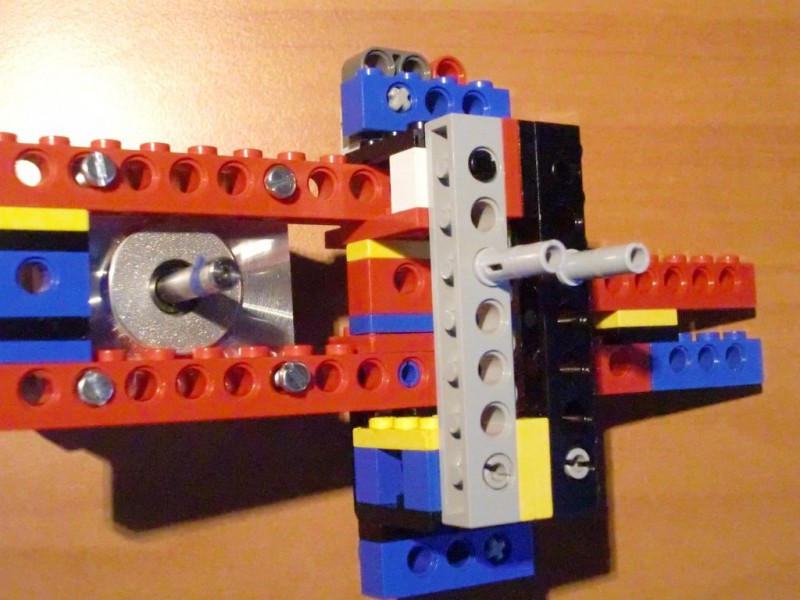
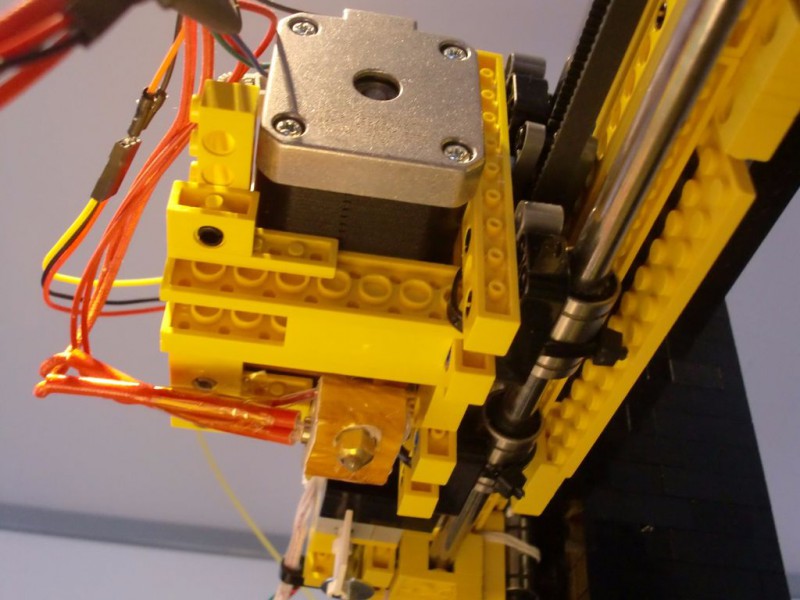
Nema двигатели крепятся конструкцией из трех рядов пластин с отверстиями 2х4 и 2х8, между собой ряды скрепляются болтами М3х15. При установке двигателя возникает такой момент, что его центр располагается между шипами как по оси X, так и по оси Y, то есть он сдвинут относительно направляющего стержня. Поэтому его нужно сдвинуть на полкирпичика по оси Х, чтобы его центр стал точно напротив направляющей (третье фото).
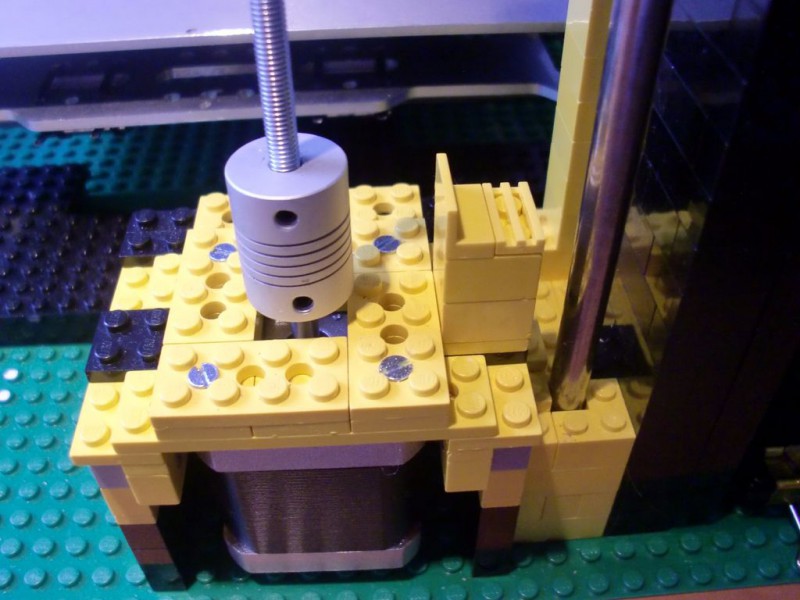
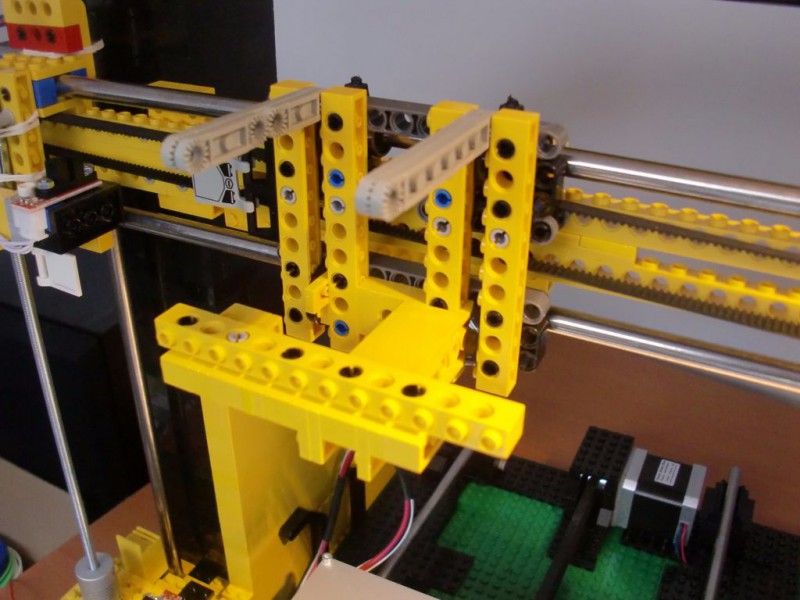
Направляющие стержни крепятся в верхней части рамки (последнее фото), на вал шагового двигателя монтируется резьбовой стержень (пятое фото). Они оба будут привязаны к оси Х.
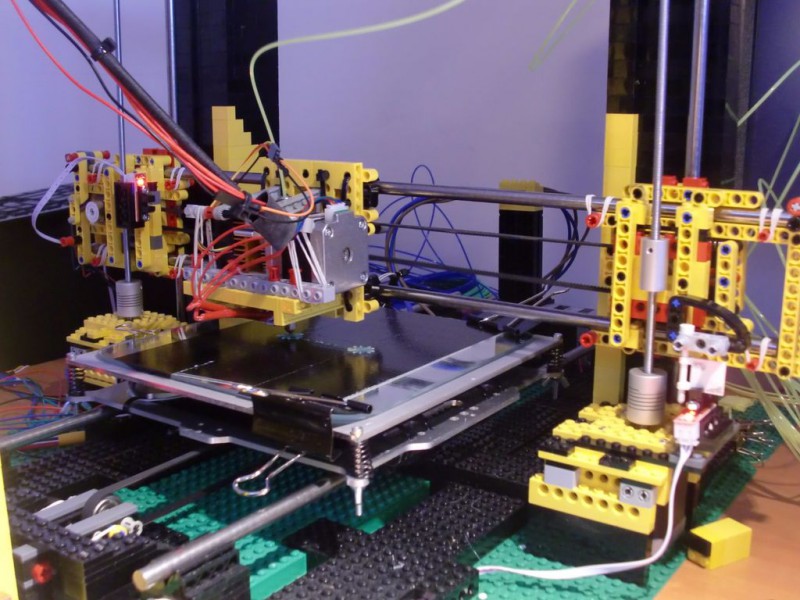
Шаг 4: Ось X — двигатель


Это самый сложный этап сборки самоделки, так как ось Х перемещается вверх-вниз по оси Z и при этом по самой оси Х двигается экструдер.
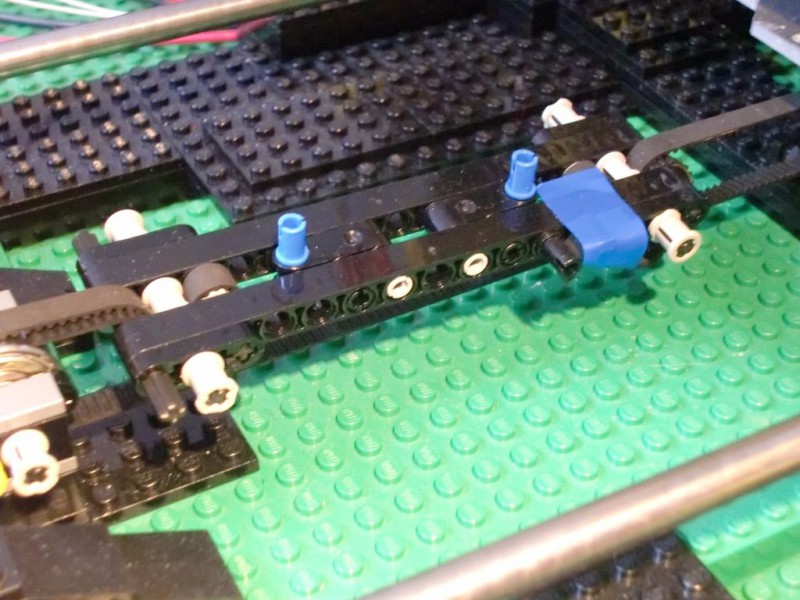
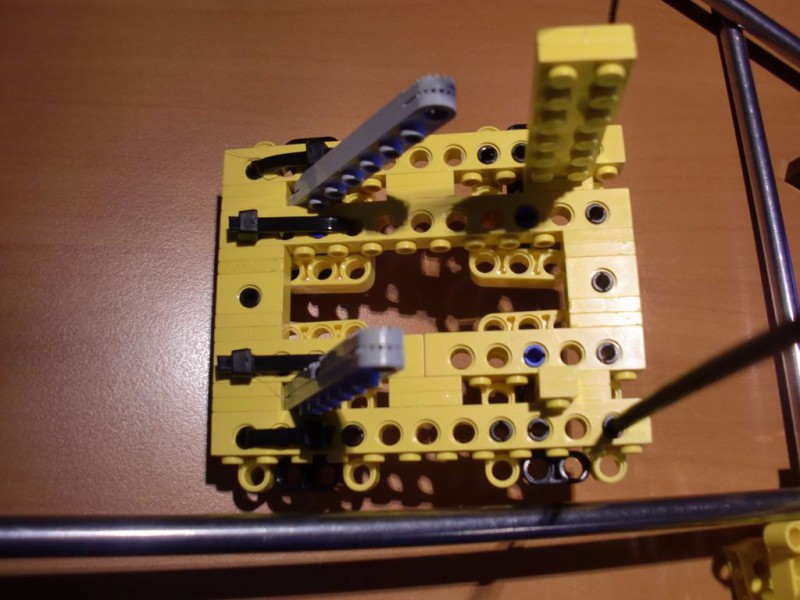
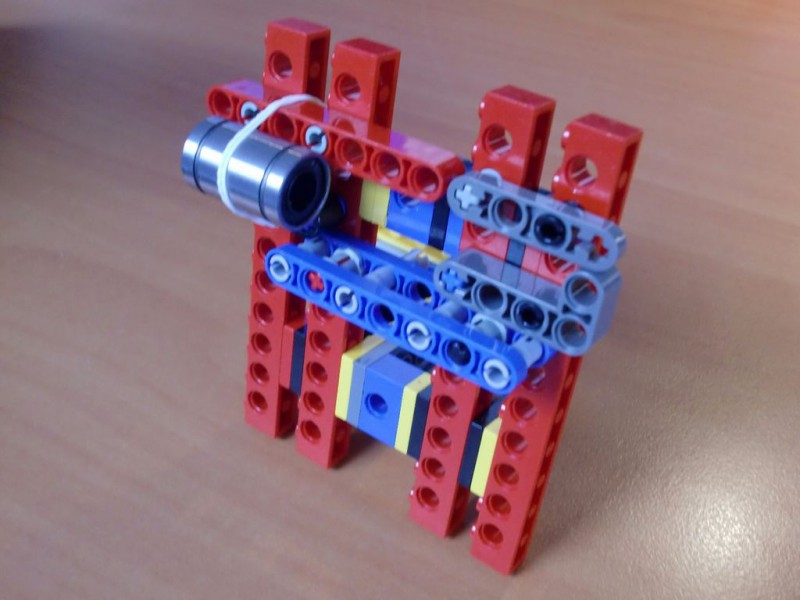
Оригинальная ось Х принтера Prusa состоит из отдельных частей, левой и правой, установленных на направляющих стержнях. Я собрал цельную большую ось Х используя большие технические кирпичики для прочности. Эта ось с двигателем, кареткой экструдера и ремнем показана на втором фото. Ее сооружение начинается со сборки правой стороны, а затем собирается левая сторона с двигателем, далее обе стороны оси соединяются с кареткой экструдера посредством подшипников, которые имеют длину 24см, ровно 3 шипа. Сами подшипники располагаются между двумя соединительными элементами нового типа (это дает 8мм, см. третье фото) и крепятся резинками или мозгохомутами.
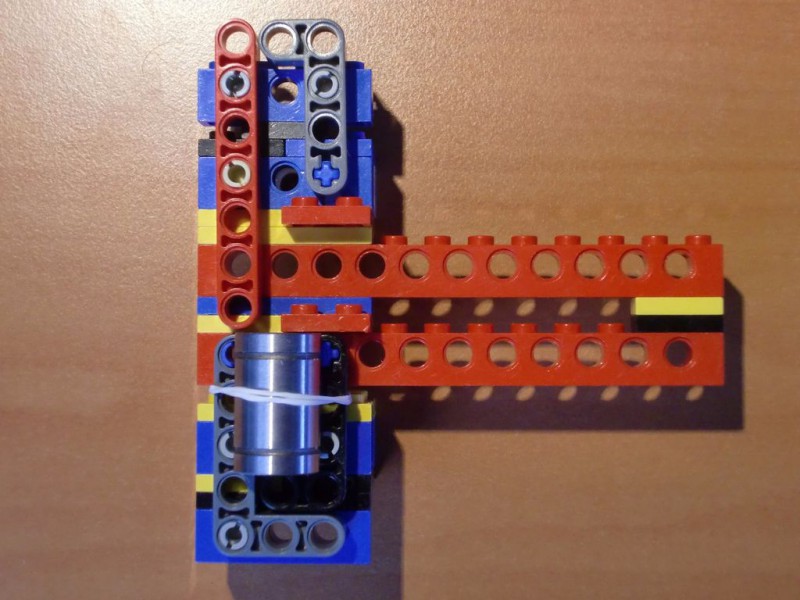
Четвертое и пятое изображения показывают правую сторону оси Х. Направляющие стержни (толщиной 8мм и длиной 50см) оси Х располагаются между двумя синими кирпичиками и между синим и белым кирпичиками (пятое фото). Два длинных красных технических кирпичика являются соединением с левой стороной оси Х.
Шаговый двигатель оси Х расположен с левой стороны, которая является почти копией правой стороны, разница лишь в двух длинных красных кирпичиках, нужных для монтажа двигателя (восьмое фото).
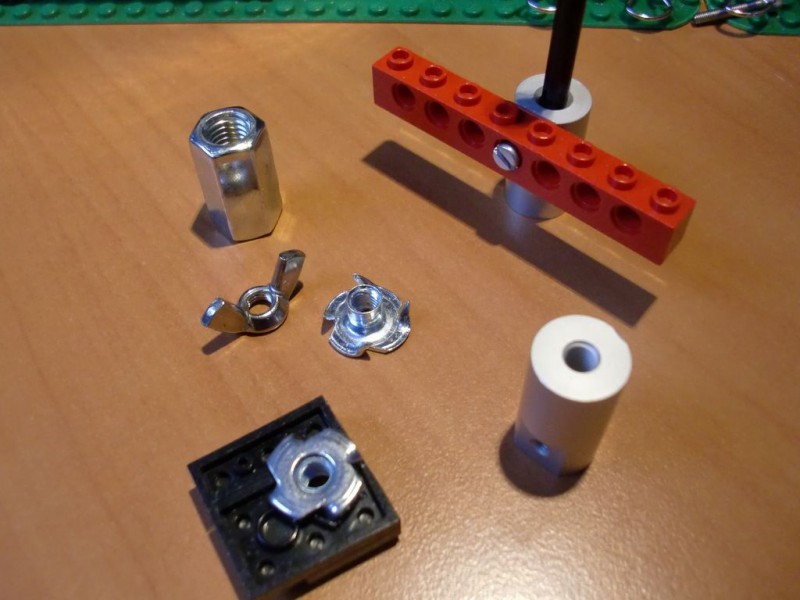
Резьбовой стержень оси Z крепится с помощью серого и черного технических кирпичиков 1х8 (восьмое фото). Между 4 длинных технических штифтов устанавливается трубка от анкерного болта 5мм с наружным диаметром 8мм и закрепляется резинкой. В этой то трубке от анкера и движется резьбовой стержень.
Шаг 5: Ось X — двигатель (второй вариант)


Как и реальная Prusa самоделка имеет варианты в сборке. Так я собрал новую ось Х на основе элементов Lego Technic, хотя и старая ось прекрасно функционирует.
В первой версии оси Х направляющие стрежни располагаются на шипах кирпичиков, в обновленной оси стержни находятся на новых технических кирпичиках, что дает более качественную ось Х. А так как стержни неподвижно прикреплены к левой и правой сторонам оси Х с помощью резинок, то отпала необходимость соединять сами стороны.
Шаг 6: Каретка экструдера и ремень
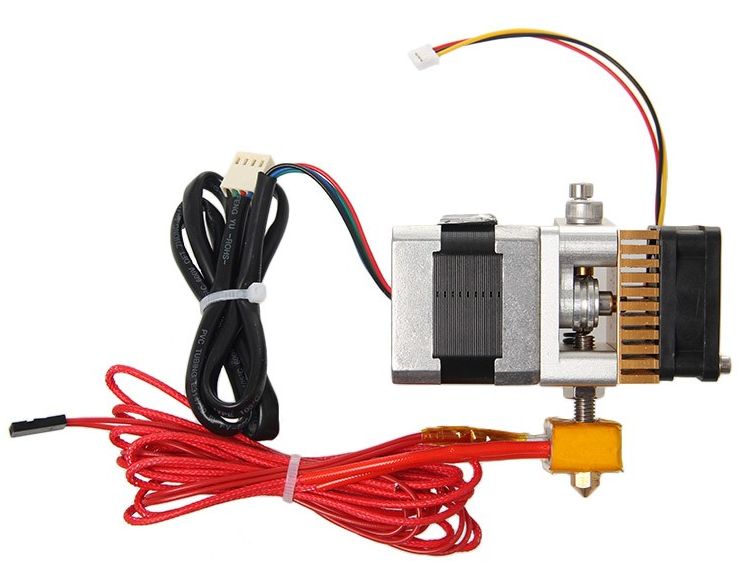


После того как оси X, Y и Z были построены я приобрел 3D экструдер.
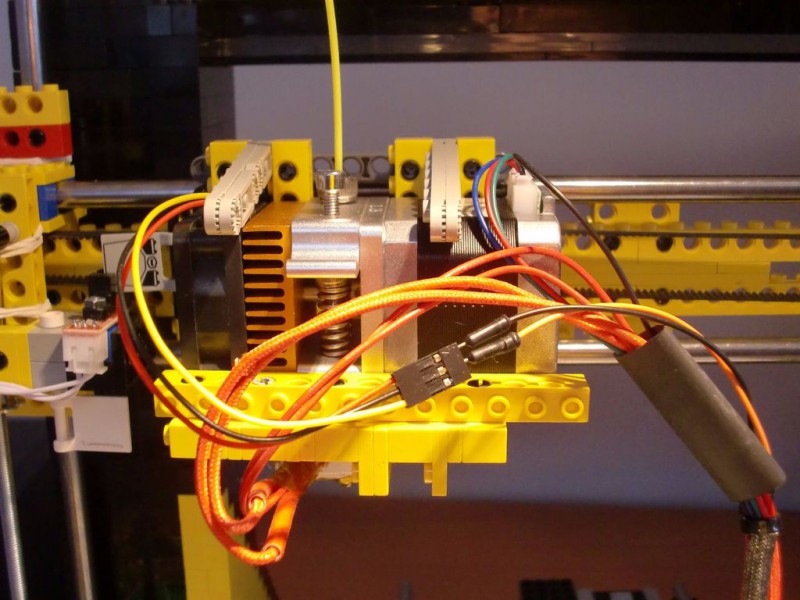
Assembled MK8 от Geeetech имеет по умолчанию сопло 0.3мм, использует рить 1.75мм и поставляется в комплекте с шаговым двигателем. Я выбрал именно этот мозгоэкструдер из-за его размеров, а именно, он по габаритам как и шаговый двигатель Nema и имеет плоскую заднюю строну.
Каретка экструдера движется с помощью все тех же подшипников LM8UU что и на других осях. На четвертом фото показано как выглядит каретка без самого экструдера, а на последних трех фото вся каретка более детально. Ее сборка начинается со сборки держателя ремня из синих штифтов, принцип как и для оси Y, вот только штифты короче, потому что держатель располагается между кареткой и осью Х.
Подшипники крепятся к каретке хомутами-стяжками (пятое фото).
Шаг 7: Концевые выключатели

Концевые выключатели останавливают каретку когда она достигла своего конечного положения, а также для обозначения стартовой (домашней, нулевой) точки оси. То есть перед началом печати каретка перемещается в по всем осям до концевика, это и есть начальная точка.
В поделке используются всего три концевых выключателя, по одному на ось. Использовать 6 концевиков, по одному на каждый конец оси, нет необходимости. Размеры печатного пространства прописываются в файле configuration.h в Marlin.
Макс PrintSize:
#define X_MAX_POS 195
#define X_MIN_POS 0
#define Y_MAX_POS 215
#define Y_MIN_POS 0
#define Z_MAX_POS 200
#define Z_MIN_POS 0
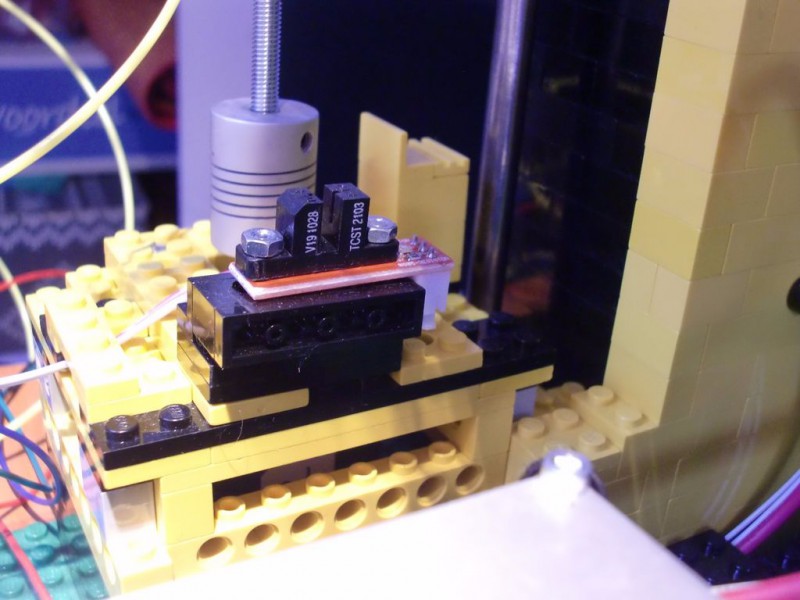
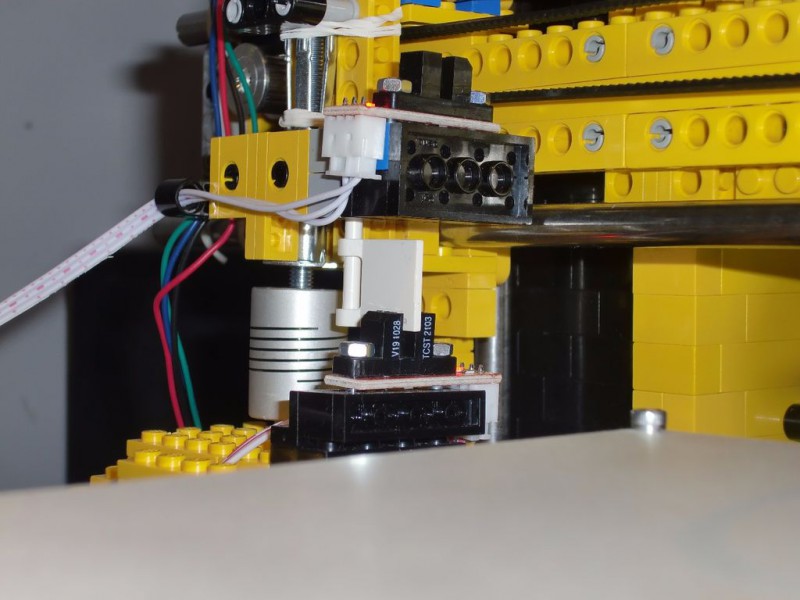
Концевые выключатели этой мозгоподелки оптические, а для обозначения конечного положения оси используются флажки (проще было использовать механические концевики). К техническим кирпичикам концевики крепятся с помощью болтов и гаек М3х15 (третье фото). Если и вы решите использовать оптические концевики, то убедитесь что флажки не двигаются во время печати!
Продолжение следует…
( Специально для МозгоЧинов #LEGO-3d-Printer
Introduction: Lego 3D Printer/plotter
Hello, thank you for looking at this!
First off, a slight update. I’m working on the 3rd version printer, which should actually be able to print. Since I won an NXT 2.0 in the Toy challenge with this, I should be able to make another one for the next contest that features a Makerbot.
I originally wanted to create a lego 3D printer for the makerbot challenge, but wasn’t able to finish it in time. So, since another makerbot is up for grabs, I decided to do a second version of the printer. Since I have no extruder, I can’t actually have it be a 3D printer. That’s why it’s currently configured as a pen plotter. Also, this takes a massive number of parts. I had to scrounge around for all the little pieces I need.
This is my first instructables, so I’ve decided to do the guide with a combination of two different techniques. I’m using Lego digital designer to design some of the sub-builds. I’ve exported each sub-build as an html file and html files are each given a number. (All of which are in the «building instructions.zip» file) I’ll reference them by B#. ie, B1, B2 or whatever. So when I say build 2 of B1, I mean open up 1.html and build it twice. If you have Lego Digital Designer (LDD) and would rather use it, the «models.zip» file has all of them by the same number. It’s just B1 is 1.lxf instead of 1.html. Sorry if that’s confusing. The second approach was to take pictures of putting the sub-builds together.
Here is a video demonstrating what it can do:
Step 1: 3d Printer Sides: the Triangles
So the first thing to build is the sides. I’m going to show you with the Z axis rail, but we will remove that later to put in the Z platform. Don’t worry, it’s pretty easy to do. I designed it mostly in Lego digital designer, but there were two pieces it didn’t let me put in, so I’ll show you that in the picture. Go ahead and build 2 of B1 (Open 1.html in the building instructions folder, and build it twice). I’ve also included the 1.lxf file if you have LDD and would rather use that. The html file is just a little bit weird. I think they need to work on their building instructions algorithm. Anyway, see the pictures for the two pieces that were missing and where they go. (One piece for each side.)
The main picture is one side fully assembled.
Step 2: Putting the Sides Together
Now that you have two side pieces done, we have to make the pieces that connect them together. So go ahead and make B2 and B3. Also, make two of B4. You should have 4 pieces when finished. (see picture)
The «feet» on the bot are actual lego feet. See the second picture on what they are and how they go together. Also see the third picture for how they attach to B2 and B3.
B4 is kinda weird. See the fourth picture for how it should correctly go together. LDD didn’t like the way it should be for some reason, but all the pieces you need will be there.
See the fifth picture for how it will look when you’re done! See pictures six for where to place B2. Pictures 7 and 8 show how one side of B3 should go.
And now, off to the next step! You can already tell that it can stand pretty well by itself.
Step 3: Z Carriage
Now for a fun yet difficult part. The Z carriage and pulley system. We’ll start off with the Z carriage which is B5, so go ahead and build that now. Be careful, as the build instructions are slightly weird. As in, they totally ignore physics a few times. I would use the .lxf file if you have Lego Digital Designer.
See the pictures for what pieces to remove. Basically, you remove the Z rails, slide the Z rails in through the slots on the side of the Z carriage, and put the Z rails back in place the same way you took them out.
Then, go ahead and build B6. I know it’s weird as well, considering it is made of multiple pieces, but see the pictures as to how it should be assembled.
Step 4: Y Platform and Carriage
And this is where I’m sure you’re saying «yeah, I know, go build B7…» (Guess what! It’s also the last one!) This model actually consists of both the Y carriage, Y axis, and the Y motor. You build the Y axis first, and then (It doesn’t say to in the model instructions) you have to build and put the Y carriage on the Y axis. You’ll see what I mean when you have a little bit of the Y axis built. It’s not that hard. See the pictures for how it should go and how it attaches to the machine. You can also just build through the entire thing, but you’ll have to redo one side on the axis so you can slide the carriage on.
Now we get to put the Y motor on. See the pictures. I’ve also added a few pieces to try and brace it. I’m not sure how that’ll turn out, but you can add something like that if you want.
Step 5: Stringing It Up!
This step is all about the string. Well… yeah, actually. I used yarn in the pulley system. I know, not the most ideal material, but hey, it’s workable. I also can’t quite describe all of this well in words, so I’ll just explain the basic concept behind doing the X and Y carriages. The Z carriage is slightly different, as it takes two different points to pull it up and down.
The X and Y axis however, are much different. They only take one string, but they are a bit harder to do. You essentially have to connect one side of the string to the pulleys, run it through and connect it to the carriage, go around the idler (either the wheel in the Y axis, or the two little knobs in the X axis) and back through the carriage to the opposite side of the motor from where you started. This one will have to wind up and down the opposite way as the first one. This is because as the first one is unwinding, the other side should be winding up. So spin the motor a few times to wind up one side so that the carriage is at one side. Then, connect the string to the other side of the motor so that you can rotate the motor and the carriage goes back and forth.
The Y carriage gave me a lot of troubles, and if I had time and more pieces, I would probably completely redo it, but I’m afraid I don’t/didn’t have either. Maybe in another version. A side note about the two wheels on the bottom with the Z motor. Only use one of them. It’s up to you which one. Technically, it’s a design flaw, but hey, it’s doesn’t hurt to have both, right?
Again, see the pictures for some stringing guidelines. If I make another version of this, I’ll have to figure out how to do that better. In the meantime, that’ll have to do.
After connecting all the strings up, you might have to tighten or loosen them, but you can then put the build plate on, and you’re done!
Step 6: Programming!
Okay, so now for the part I actually claim to be good at. Programming! That’s right, as America’s past time…
So I decide to use lejos for this, because I like it, and was I kinda in a rush. It makes code fairly easy to turn out. Okay, so our printer needs a few functions. It needs to be able to:
1) calibrate the printer (Demonstration video at the beginning)
2) accept commands, most likely from USB, detailing how the printer should move. (Probably not gonna be full GCode support though)
3) dance???
I used A, B, and C motors for X, Y, and Z respectively. I gave it the options to Connect, Calibrate, Check calibration, or Exit. Sorry, no dancing for this bot.
To make it easy, I just set up Bluetooth to connect using the serial port /dev/tty.nxt on my computer. I then had replicatorg try and connect to it. Unfortunately, it was so slow that replicatorg gave up on it before any data was even sent to the printer! So that’s a no go. I would try USB, but I’ve never dealt with USB and replicatorg, and I don’t even know if that’s supported. I still left the option in there, because it will print in hex what it receives over bluetooth, and write it to «log.txt».
It can calibrate the printer, which really doesn’t do much except find the bounds of the printer, and write them to the LG3DP.pref file. Checking only checks what’s in that file. ie, the current calibration settings. They represent the degrees of rotation (The tachometer count) where the axis would start on one side and be 0, rotate that measurement, and be at the other side. It’s basically the distance from one side to the other on the axis.
And of course, exiting. Sad to see you go.
Насколько «бюджетным» может быть 3D-принтер? Пока производители пытаются ответить на этот вопрос, жонглируя максимально упрощенными конструкциями, оптовыми соглашениями на поставку компонентов и использованием филиппинцев в качестве дешевой рабочей силы, Мэтью Крюгер давно поставил рекорд, побить который будет сложно, если не невозможно. Не будучи обремененным хитростями российской таможни, Мэтью еще пару лет назад имел возможность приобрести вполне достойный RepRap за какие-нибудь $500, но посчитал такие расходы излишней роскошью. Его решение? 3D-принтер, собранный из LEGO. Да, это давняя история, но мы решили напомнить о ней ради вдохновения неизмеримых талантов на нашем портале.

Собственно, дело не столько в дешевизне LEGO, сколько в наличие конструктора в рабоче-игровом инвентаре нашего героя. Вся суть проекта сводится к постройке 3D-принтера из подручных средств. Сюда вошел старый моторчик от камеры и термоклеевый пистолет в качестве экструдера. 3D-печатная революция? Нет. Просто пример результата неудержимой фантазии настоящего самодельщика.
Началось все со знакомства Крюгера с Thing-O-Matic. Помните эти финтифлюшки? Этакие неказистые коробочки, которые породили не только несколько поколений принтеров под знаменитым брендом MakerBot, но и вдохновили целый легион энтузиастов и промышленников, невозбранно копирующих заложенные в нем идеи по сей день. Вот только Мэтью такой принтер пришелся не по карману, ибо в то время он был всего лишь бедным студентом. А что делать начинающему инженеру, необремененному толстым кошельком? Правильный ответ: задействовать талант, приправить его полученными знаниями и сделать 3D-принтер из того хлама, что валяется под ногами.

Результатом его стараний стал LEGObot – самодельный 3D-принтер, имитирующий архитектуру оригинального «репликатора». Правда, шасси выполнено из LEGO-кирпичиков, а печатает принтер не пластиком, а термоклеем… но таки печатает! Кстати, Мэтью Крюгер уже стал своего рода легендой RepRap сообщества. Весьма возможно, что именно ему принадлежит идея переработки пластиковой тары в филамент, вдохновением для которой стал экструдер Лаймана. Но вернемся к LEGObot.

Крюгер столкнулся с определенными проблемами на этапе программирования, так как в качестве контроллера он использовал LEGO Mindstorms NXT. «К сожалению, я еще тот программист. Мне пришлось вручную писать G-код команды для контроллера, так как подходящего компилятора для NXT мне найти не удалось», – рассказывает Мэтью.
Как правило, 3D-принтеры получают набор команд, регулирующих движение экструдера и платформы в форме G-кода – набора пошаговых инструкций. Инструкции генерируются “слайсерами”, то бишь программами, нарезающими трехмерные цифровые модели на двухмерные слои и генерирующими набор команд для «вырисовывания» каждого слоя. К сожалению, система NXT никогда не была полностью «открытой». «Чтобы сделать мой принтер полностью функциональным, нужно его перепрошить так, чтобы он принимал G-код, а у меня пока не хватает навыков. Правда, я натолкнулся на человека, который работает над компилятором для NXT. На него и надежда», – поясняет Мэтью.

Само собой, назвать такой проект «серьезным» сложно. В лучшем случае, это просто забавный эксперимент. Постройка шасси из «кирпичиков», в частности, гарантирует всевозможные вибрации в процессе печати. Так к чему, вообще, вся эта затея? «Мне нравится продлевать жизнь всевозможного барахла. Тут и экономия, и уменьшение мусора на свалках», – объясняет создатель. Что же, это очень даже правильно. Ну а если кто-то сомневается в работоспособности такого «репстрапа», просим полюбоваться:
На чтение 10 мин. Просмотров 1 Опубликовано 27 апреля, 2023
Содержание
- Принтер из Lego Mindstorms «STALKER ver. 2.0»
- МозгоЧины
- Собираем 3D принтер из LEGO-блоков — часть 1
- Собираем 3D принтер из LEGO-блоков — часть 1
- Шаг 1: Материалы
- Шаг 2: Ось Y — двигатель и ремень
- Шаг 3: Ось Z — двигатель и резьбовой стержень
- Шаг 4: Ось X — двигатель
- Шаг 5: Ось X — двигатель (второй вариант)
- Шаг 6: Каретка экструдера и ремень
- Шаг 7: Концевые выключатели
Принтер из Lego Mindstorms «STALKER ver. 2.0»

Название проекта: Принтер «STALKER ver. 2.0»
Платформа: LEGO Mindstorms
Автор проекта: Столяренко Даниил Владимирович (7 класс).
Руководитель: Кузнецов Алексей Александрович.
Из ЛЕГО могут быть созданы предметы, заменяющие различные электроприборы. Такая идея может показаться глупой, но такие проекты полезны в образовательных целях. Lego Mindstorms — это развивающий конструктор для детей и подростков.
Устройство с механической (электрической) системой управления собрано в образовательных целях и используется на уроках информатики. на которых дети имеют возможность программировать принтер из Lego Mindstorms 2.0.

«STALKER ver. 2.0»– это даже не принтер, а самый настоящий робот. Используя его, можно изучить не только, как работает принтер, но и программы для рисования.
Описываемая конструкция включает в себя сотни кубиков конструктора LEGO, моторы, провода, датчики и держатель для маркера, с помощью которого принтер оставляет изображения на бумаге.
Но не стоит забывать, что это прототип устройства, сконструированный тринадцатилетним подростком. Собрав принтер, он был в восторге, но сталкивался с различными проблемами: при втягивании в себя бумагу, принтер зажёвывал её. Вторая проблема была в том, что печатающая головка моталась и была нестабильной.
После устранения проблемы появилась вторая версия прототипа принтера, которая превосходит предшественника во всём. Главным плюсом стало наличие лотка для подачи бумаги. Так появился принтер из Lego Mindstorms «STALKER ver. 2.0».
15 января 2016 года на базе Пензенского государственного университета прошла VII областная научно-практическая конференция обучающихся по конструкторской , научно-исследовательской и изобретательской деятельности «Эврика».
Победителем в секции «Роботехника» стал автор проекта принтера из Lego Mindstorms «STALKER ver. 2.0» Даниил Столяренко, обучающийся в МБОУ лицея № 21 города Кузнецка. ( руководитель — учитель информатики, Кузнецов Алексей Александрович).
Победители и призёры награждены дипломами Министерства образования Пензенской области и рекомендованы для участия в конкурсе научно-технического творчества обучающихся Союзного государства «Таланты XXI века», который пройдёт в 2017 году в Белорусии.
Использованные компоненты: Конструктор LEGO Mindstorms NXT 2.0
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 
Источник
Сайт про изобретения своими руками
МозгоЧины
Сайт про изобретения своими руками
Собираем 3D принтер из LEGO-блоков — часть 1
Собираем 3D принтер из LEGO-блоков — часть 1

Доброго дня, мозгодрузья! Такая замечательная вещь как конструктор Lego вдохновила меня на создание своими руками 3D-принтера, а что из этого получилось читайте далее.
В основе этого Lego-принтера лежит модифицированный принтер Prusa I3. Изначально самоделка была плоттером формата А4 на шаговых двигателях от старого принтера, после замены которых на Nema 17, было решено добавить еще одну ось, так мозгоподелка и стала 3D принтером.
Приятным моментом было то, что блоки Lego и моторы Nema 17 идеально подходят друг к другу. Размеры блока 4х2 32х16х9,6мм, а моторы имеют отверстия М3 на расстоянии 31мм. Таким образом прикрепив моторы к Lego-конструкции с помощью уплотнителя на болты М3х15, получается прочная база-кронштейн (см. фото). Для сборки Lego-конструкций полезно руководство Lego Dimension Guide
Это мое первое мозгоруководство и оно не является окончательным руководством по созданию Lego-принтера, я привожу лишь основные моменты, и всю информацию для сборки этой самоделки я взял из сети.
. ВНИМАНИЕ: Несмотря на внешний вид этот 3D-принтер не игрушка! Не оставляйте без внимание работающий принтер, так как температура рабочего стола может достигать 110 градусов Цельсия, а температура печатающей головки только начинается со 170 градусов Цельсия! Поэтому будьте осторожны при работе с принтером!
Шаг 1: Материалы
Данная поделка не состоит на 100% из Lego деталей, у меня просто нет достаточного количества деталей серии Mindstorms, да еще Lego используют сервомоторы, а в 3D-принтерах применяются шаговые двигатели. И последней причиной является софт используемый для управления принтером: я пользуюсь Marlin для Atmega 2560 и Pronterface установленный на мозгоноутбуке.
Помимо большого количества Lego-блоков понадобятся несколько компонентов из Prusa i3. Стержни, в зависимости от габаритов вашего принтера, лучше приобрести по 100см, чем использовать имеющиеся в Prusa i3.
— гладкий стержень 8мм 100см — 3шт.
— резьбовой стержень M5 100см
— линейный подшипник LM8UU — 11шт.
— шариковый подшипник 608 — 2шт.
— гибкая муфта 5×5 — 2шт.
— шаговый двигатель Nema 17 — 4шт.
— шкив GT2 — 2шт.
— ремень GT2 — 200см
— Y-разный каркас (можно использовать Lego)
— рабочая поверхность
— стеклянная поверхность
— термистор 100кОм
— канцелярские зажимы — 4шт.
— плата Ramps
— ATmega 2560
— драйвер шагового двигателя Stepstick — 4шт.
— концевые выключатели -3шт.
— блок питания
— набор проводов и кабелей для Ramps — 1шт.
— экструдер с Nema редуктором (1x)
А также болты, гайки и шайбы в зависимости от выбранной комплектации. К примеру, шаговые двигатели к Lego-конструкциям лучше крепить болтами М3х15.
Шаг 2: Ось Y — двигатель и ремень
Строительство принтера начинается со сборки основания и основание этой самоделки насчитывает по сторонам 34х64 шипов или 19,2х51,2см., и является серединой в общей базе площадью 56х64 шипов.
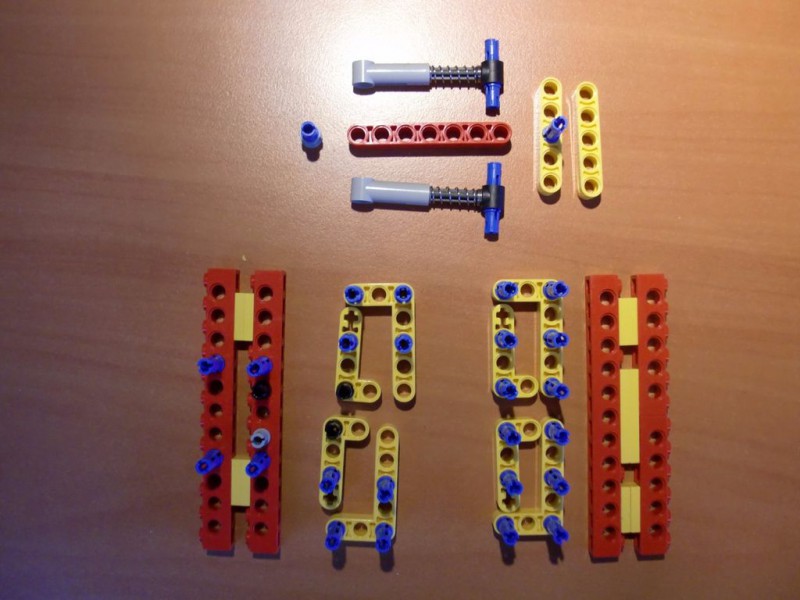
После создания основания определяем расстояние для установки направляющих стержней оси Y. Y-образный каркас размещается посредством подшипников LM8UU на расстоянии 170мм. Это занимает 21,25 шипа, где 1/4 шипа получается за счет детали «забор» используемой для крепления направляющих (см. второе фото). Также в креплении применяются четыре Lego-детали «кирпич с поручнем», которые размещаются напротив друг друга (см. третье фото). Общая высота крепления составляет 4 кирпичика (каретка движется выше шагового двигателя), сами направляющие длиной 50см и крепятся хомутами (последние два фото).
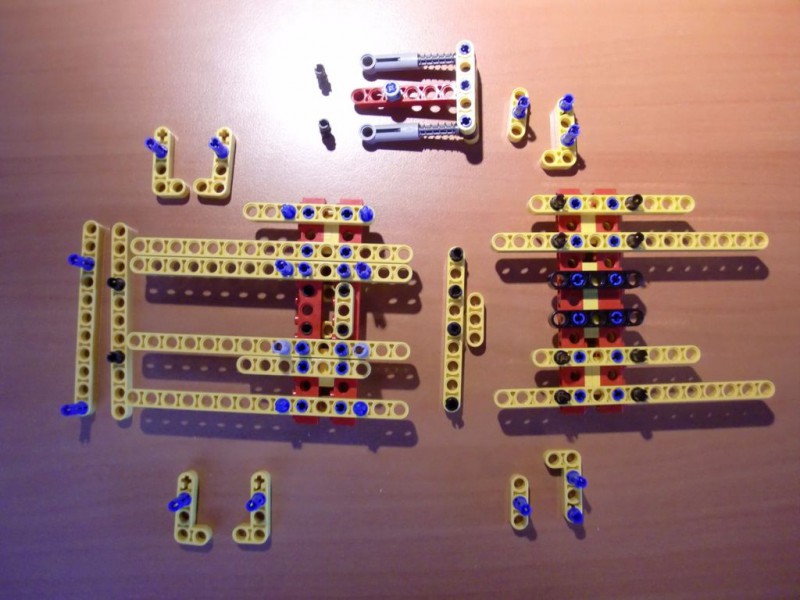
Шаговый двигатель размещен с задней части мозгоподелки с помощью технических кирпичиков, на его вал установлен шкив. Кронштейн подшипника регулируемый, то есть с помощью резинок можно произвести натяжку зубчатого ремня (четвертое фото). Сами резинки крепятся на кронштейн после установки ремня на каретку.
Зубчатый ремень соединен с Lego-кареткой, в которой два синих штырька служат для установки Y-образной рамки (первое фото).
Шаг 3: Ось Z — двигатель и резьбовой стержень
После сборки оси Y начинается сборка рамки. Общая высота принтера 44 кирпичика или 42см. Итак, сначала собираются две прочных L-образных стойки высотой в 36 кирпичиков, эта высота определяет максимально возможную высоту распечатываемой мозгофигуры. Слишком высокую рамку собирать не стоит, так как это снижает прочность рамки. Для строительства этих стоек применяются технические кирпичики, каждый пятый ряд из модифицированных кирпичиков, а для жесткости все связывается пластинами (второе фото). После сборки стоек они связываются между собой по верхнему краю.
Кстати, рамку можно сделать из дерева или листового акрила.
Стержень толщиной 8мм и длиной 50см можно разместить в пространстве 1х1см, Lego-блоки 1х1 как раз точно соответствуют 8-мм. Из-за размеров экструдера сам стержень размещен спереди, на 36-м шипе основания, а не по середине.
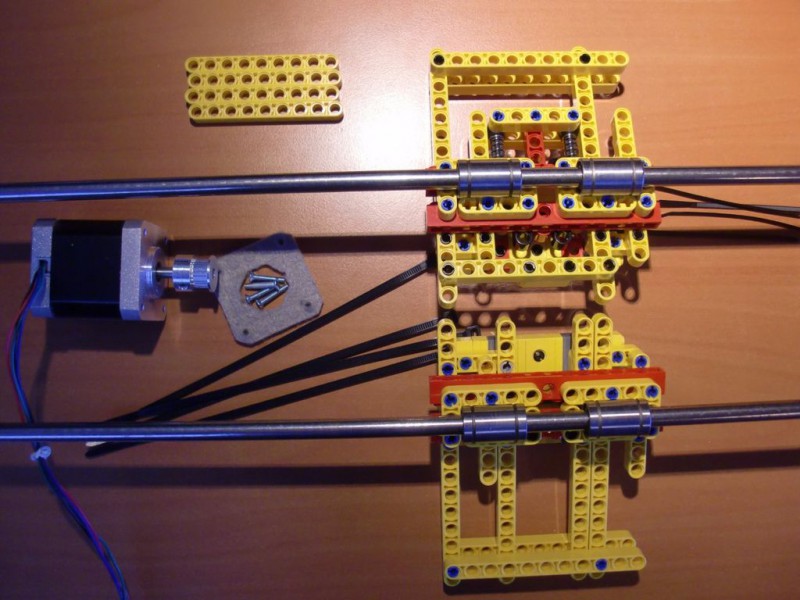
Nema двигатели крепятся конструкцией из трех рядов пластин с отверстиями 2х4 и 2х8, между собой ряды скрепляются болтами М3х15. При установке двигателя возникает такой момент, что его центр располагается между шипами как по оси X, так и по оси Y, то есть он сдвинут относительно направляющего стержня. Поэтому его нужно сдвинуть на полкирпичика по оси Х, чтобы его центр стал точно напротив направляющей (третье фото).
Направляющие стержни крепятся в верхней части рамки (последнее фото), на вал шагового двигателя монтируется резьбовой стержень (пятое фото). Они оба будут привязаны к оси Х.
Шаг 4: Ось X — двигатель
Это самый сложный этап сборки самоделки, так как ось Х перемещается вверх-вниз по оси Z и при этом по самой оси Х двигается экструдер.
Оригинальная ось Х принтера Prusa состоит из отдельных частей, левой и правой, установленных на направляющих стержнях. Я собрал цельную большую ось Х используя большие технические кирпичики для прочности. Эта ось с двигателем, кареткой экструдера и ремнем показана на втором фото. Ее сооружение начинается со сборки правой стороны, а затем собирается левая сторона с двигателем, далее обе стороны оси соединяются с кареткой экструдера посредством подшипников, которые имеют длину 24см, ровно 3 шипа. Сами подшипники располагаются между двумя соединительными элементами нового типа (это дает 8мм, см. третье фото) и крепятся резинками или мозгохомутами.
Четвертое и пятое изображения показывают правую сторону оси Х. Направляющие стержни (толщиной 8мм и длиной 50см) оси Х располагаются между двумя синими кирпичиками и между синим и белым кирпичиками (пятое фото). Два длинных красных технических кирпичика являются соединением с левой стороной оси Х.
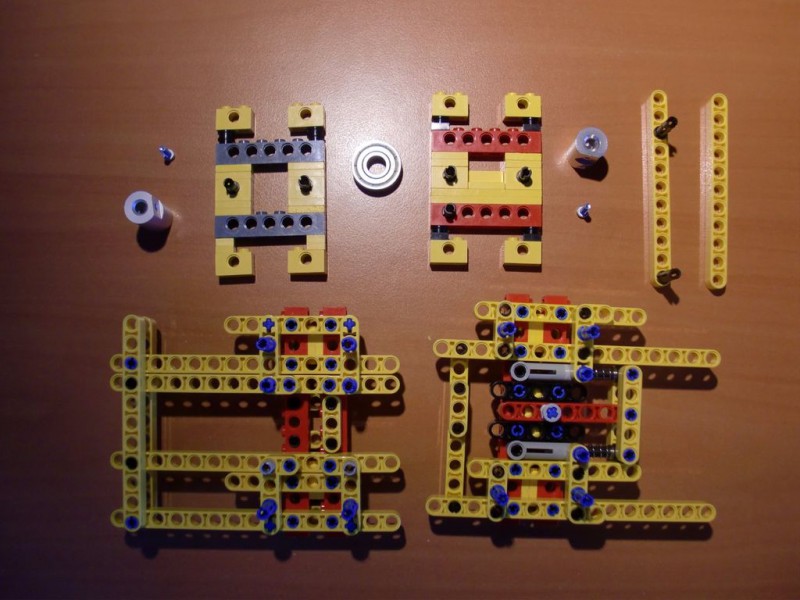
Шаговый двигатель оси Х расположен с левой стороны, которая является почти копией правой стороны, разница лишь в двух длинных красных кирпичиках, нужных для монтажа двигателя (восьмое фото).
Резьбовой стержень оси Z крепится с помощью серого и черного технических кирпичиков 1х8 (восьмое фото). Между 4 длинных технических штифтов устанавливается трубка от анкерного болта 5мм с наружным диаметром 8мм и закрепляется резинкой. В этой то трубке от анкера и движется резьбовой стержень.
Шаг 5: Ось X — двигатель (второй вариант)
Как и реальная Prusa самоделка имеет варианты в сборке. Так я собрал новую ось Х на основе элементов Lego Technic, хотя и старая ось прекрасно функционирует.
В первой версии оси Х направляющие стрежни располагаются на шипах кирпичиков, в обновленной оси стержни находятся на новых технических кирпичиках, что дает более качественную ось Х. А так как стержни неподвижно прикреплены к левой и правой сторонам оси Х с помощью резинок, то отпала необходимость соединять сами стороны.
Шаг 6: Каретка экструдера и ремень
После того как оси X, Y и Z были построены я приобрел 3D экструдер.
Assembled MK8 от Geeetech имеет по умолчанию сопло 0.3мм, использует рить 1.75мм и поставляется в комплекте с шаговым двигателем. Я выбрал именно этот мозгоэкструдер из-за его размеров, а именно, он по габаритам как и шаговый двигатель Nema и имеет плоскую заднюю строну.
Каретка экструдера движется с помощью все тех же подшипников LM8UU что и на других осях. На четвертом фото показано как выглядит каретка без самого экструдера, а на последних трех фото вся каретка более детально. Ее сборка начинается со сборки держателя ремня из синих штифтов, принцип как и для оси Y, вот только штифты короче, потому что держатель располагается между кареткой и осью Х.
Подшипники крепятся к каретке хомутами-стяжками (пятое фото).
Шаг 7: Концевые выключатели
Концевые выключатели останавливают каретку когда она достигла своего конечного положения, а также для обозначения стартовой (домашней, нулевой) точки оси. То есть перед началом печати каретка перемещается в по всем осям до концевика, это и есть начальная точка.
В поделке используются всего три концевых выключателя, по одному на ось. Использовать 6 концевиков, по одному на каждый конец оси, нет необходимости. Размеры печатного пространства прописываются в файле configuration.h в Marlin.
Макс PrintSize:
#define X_MAX_POS 195
#define X_MIN_POS 0
#define Y_MAX_POS 215
#define Y_MIN_POS 0
#define Z_MAX_POS 200
#define Z_MIN_POS 0
Концевые выключатели этой мозгоподелки оптические, а для обозначения конечного положения оси используются флажки (проще было использовать механические концевики). К техническим кирпичикам концевики крепятся с помощью болтов и гаек М3х15 (третье фото). Если и вы решите использовать оптические концевики, то убедитесь что флажки не двигаются во время печати!
( Специально для МозгоЧинов #LEGO-3d-Printer
Источник
Перейти к содержимому
- admin@nailkashapov.ru
Телеграм
Математика и точка
Быстрые ссылки
- ВПР
- ЕГЭ
- Математика
- О себе
- Памятки
- Подготовка к ОГЭ математика
![]()
Математика и точка
Сайт учителя Наиля Кашапова
Искать:
Математика и точка > Робототехника > Пошаговая инструкция по созданию модели “Принтер” с набором лего wedo2
08.01.202321.06.2023 Nail Kashapov
Пошаговая инструкция по созданию модели “Принтер” с набором лего WeDo2. Группа в контакте – https://vk.com/clubrobototehnikov
Телеграм канал – https://t.me/robototekhnik
Набор лего wedo2(аналог) можно купить тут – https://robo-master.company.site
Printer-wedo2Скачать
Похожее
Добавить комментарий
Ваш адрес email не будет опубликован. Обязательные поля помечены *
Комментарий *
Имя *
Email *
Сайт
Сохранить моё имя, email и адрес сайта в этом браузере для последующих моих комментариев.
The reCAPTCHA verification period has expired. Please reload the page.