 Статті
Статті  8
8 ![]() 30.11.2015
30.11.2015 ![]() 30.12.2017
30.12.2017

Содержание
- Введение
- Внешний вид
- Описание
- Схемы подключения
- Подключение драйвера к периферии
- Настройка переключателей
- Подключение силовых цепей
- Светодиодная индикация
Введение:
Основанная на чипе TB6600HG новая модель драйвера BL-TB6600-V1.2 пришла на замену популярному драйверу BL-TB6560-V2.0.
Этот драйвер-контроллер подойдет для построения не только любительских систем ЧПУ, но и профессиональных, основаных на двигателях высокой мощности. Если сравнивать с предыдущим поколением драйвера TB6560AHG, то выходная мощность у TB6600HG возросла до 200Вт (как видим практическое удвоение по значению мощности), рабочее напряжение поднято с 35В (TB6560AHG) до 50В, рабочий ток увеличен до 4.5А (5А пиковое значение).
Увеличена максимальная рабочая частота.
Добавлены схемы защиты.
К основной «вкусности» данного драйвера можно отнести интеллектуальное управление током и использование ШИМ моделяции, благодаря чему есть возможность подключать к драйверу шаговые двигатели любого напряжения питания и тока — на установленном уровне микросхема сама ограничит максимальный ток.
Внешний вид:




| Свойства | Параметры |
|---|---|
| Входное напряжение силовой части | от 8В до 50В постоянного напряжения (36В рекомендуется) |
| Выходной ток | от 0.3А до 4.5А (пиковое значение 5А) |
| Микрошаг | 1 .. 2 .. 8 .. 16 |
| Максимальная частота ШИМ | 200кГц |
| Регулировки максимального тока ШД |
1.1А .. 2.2А .. 3.3А .. 4.5А |
| Регулировки тока удержания |
50% или 100% |
| Температура эксплуатации | от -10 до +45° С |
| Размеры | 80мм*50мм*35мм |
| Вес | 118.3г |
Описание:
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
| Маркировка | Описание |
|---|---|
| 24V+ | Положительный контакт для подключения блока питания (питания шагового двигателя) постоянное напряжение |
| GND | Отрицательный контакты для подключения блока питания (питания шагового двигателя) постоянное напряжение |
| CLK- | Вход для шаговых импульсов STEP (рабочим является передний фронт, длительность > 10мкс) |
| CW- | Вход для управления направлением вращения вала шагового двигателя (DIR) |
| EN- | Вход для включения/выключения шагового двигателя (ENABLE) |
| +5V | Общий сигнальный провод |
| A+,A- | Контакты для подключения I фазной обмотки шагового двигателя |
| B+,B- | Контакты для подключения II фазной обмотки шагового двигателя |
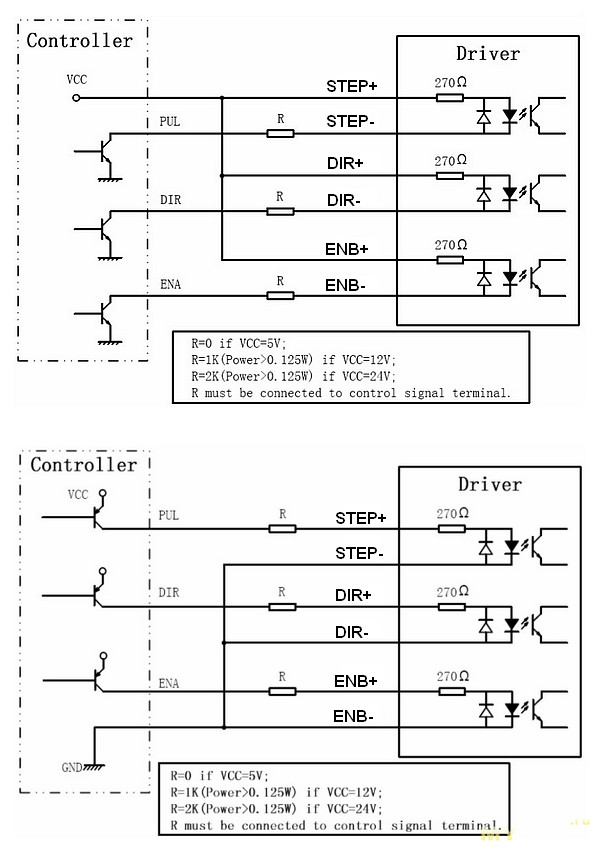
Схемы подключения:
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором

Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором

Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
- При VCC = 5В, R_CLK = R_CW = R_EN = 0;
- При VCC = 12В, R_CLK = R_CW = 1кОм, R_EN = 1.5кОм;
- При VCC = 24В, R_CLK = R_CW = 2кОм, R_EN = 3кОм;
Подключение драйвера BL-TB6600-v1.2 к плате BL-MACH-V1.1:

Более подробно о интерфейсной плате BL-MACH-V1.1 можно узнать по ссылке Плата коммутационная (контроллер) BL-MACH-V1.1
СТАТЬЯ В ПРОЦЕССЕ НАПИСАНИЯ
Обновлено: 30.12.2017
TB6600 Stepper Motor Driver Драйвер для шагового двигателя (общий вид)
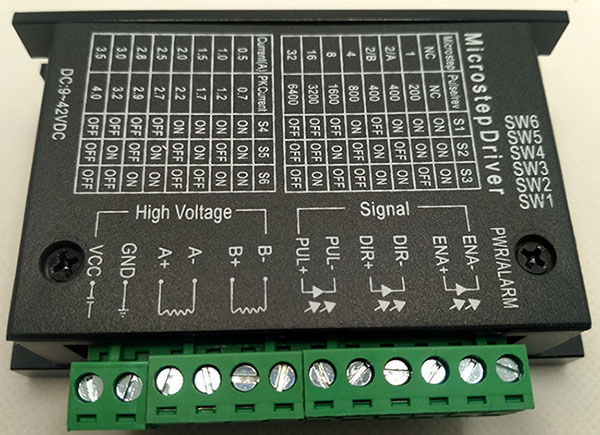

Характеристики драйвера TB6600
Входной ток 0…5A;
Выходной ток 0.5…4.0A;
DC 9…42V;
Максимальная мощность 160W;
Максимальная частота ШИМ 200кГц;
Температура эксплуатации от -10 до +45℃;
Габариты 96x56x33 mm;
Вес 0.2 кг;
Микросхема привода TB67S109AFTG.
8 типов микрошагов NC, 1(200), 2/A(400), 2/B(400), 4(800), 8(1600), 16(3200), 32(6400)
8 типов регулирования тока 0,5 А, 1А, 1,5А, 2А, 2,5А, 2,8А, 3,0А, 3,5А
A+,A- подключение I фазной обмотки шагового двигателя;
B+,B- подключение II фазной обмотки шагового двигателя;
PUL (STEP) – генерирует тактовые импульсы для запуска шагового двигателя (активный уровень — 1);
DIR – логический сигнал для установки направления двигателя, смена направления вращения;
осуществляется при отсутствии импульсов на пине PUL; (при изменении состояния должно пройти не менее 10 мкс до подачи импульса на вход «PUL») (активный уровень — 1);
ENA – разрешающий сигнал, отключение и включение двигателя (активный уровень — 0).
Таблица настройки частоты вращения двигателя драйвера шагового двигателя TB6600
| Microstep | Pulse/rev | s1 | s2 | s3 |
| NC | NC | ON | ON | ON |
| 1 | 200 | ON | ON | OFF |
| 2/A | 400 | ON | OFF | ON |
| 2/B | 400 | OFF | ON | ON |
| 4 | 800 | ON | OFF | OFF |
| 8 | 1600 | OFF | ON | OFF |
| 16 | 3200 | OFF | OFF | ON |
| 32 | 6400 | OFF | OFF | OFF |
Таблица токов драйвера шагового двигателя TB6600
| Current(A) | PK Current | s4 | s5 | s6 |
| 0.5 | 0.7 | ON | ON | ON |
| 1.0 | 1.2 | ON | OFF | ON |
| 1.5 | 1.7 | ON | ON | OFF |
| 2.0 | 2.2 | ON | OFF | OFF |
| 2.5 | 2.7 | OFF | ON | ON |
| 2.8 | 2.9 | OFF | OFF | ON |
| 3.0 | 3.2 | OFF | ON | OFF |
| 3.5 | 4.0 | OFF | OFF | OFF |
Схема подключения TB6600 Nema 17 к Arduino Nano
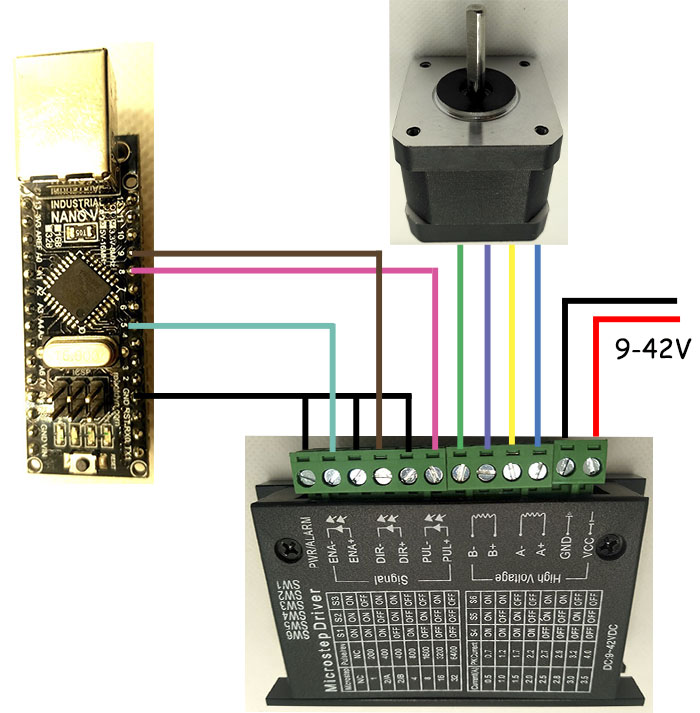
Вид подключаемого шагового двигателя Nema 17


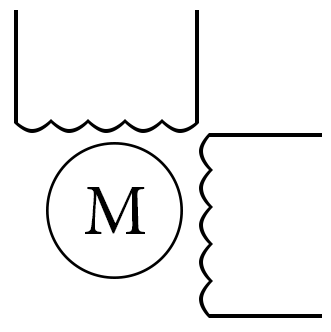
Схема обмоток шагового двигателя
Пример скетч работы шагового двигателя Nema 17 и драйвера TB6600 Arduino
#define MOTOR_PUL_PIN 9
#define MOTOR_DIR_PIN 8
#define MOTOR_ENA_PIN 5
void setup() {
pinMode (MOTOR_PUL_PIN, OUTPUT);
pinMode (MOTOR_DIR_PIN, OUTPUT);
pinMode (MOTOR_ENA_PIN, OUTPUT);
}
void loop() {
// мотор крутится по часовой стрелки
for (int i=0; i<3200; i++)
{
digitalWrite(MOTOR_DIR_PIN,HIGH);
digitalWrite(MOTOR_ENA_PIN,HIGH);
digitalWrite(MOTOR_PUL_PIN,HIGH);
delayMicroseconds(200);
digitalWrite(MOTOR_PUL_PIN,LOW);
delayMicroseconds(200);
}
// мотор крутится по против часовой стрелки
for (int i=0; i<3200; i++)
{
digitalWrite(MOTOR_DIR_PIN,LOW);
digitalWrite(MOTOR_ENA_PIN,HIGH);
digitalWrite(MOTOR_PUL_PIN,HIGH);
delayMicroseconds(200);
digitalWrite(MOTOR_PUL_PIN,LOW);
delayMicroseconds(200);
}
}
Пример скетча работы шагового двигателя один полный оборот 360 градусов Nema 17 и драйвера TB6600 Arduino
#define MOTOR_PUL_PIN 9
#define MOTOR_DIR_PIN 8
#define MOTOR_ENA_PIN 5
//временная задержка между шагами 1 мс
const int delay_pause = 1;
void setup() {
pinMode (MOTOR_PUL_PIN, OUTPUT);
pinMode (MOTOR_DIR_PIN, OUTPUT);
pinMode (MOTOR_ENA_PIN, OUTPUT);
}
void loop()
{
//устанавливаем начальный режим
digitalWrite(MOTOR_PUL_PIN, HIGH);
digitalWrite(MOTOR_DIR_PIN, LOW);
//направление вращения мотора против часовой стрелки
digitalWrite(MOTOR_DIR_PIN, HIGH);
// делаем 12800 шагов на 360 градусов оборот
for(int i = 0; i < 12800; i++)
{
digitalWrite(MOTOR_PUL_PIN, HIGH);
delay(delay_pause);
digitalWrite(MOTOR_PUL_PIN, LOW);
delay(delay_pause);
}
// пауза 5 секунд
delay(5000);
}
Код скорости вращения на драйвере TB6600 Arduino
#define Motor_PULSE_PIN 9
#define Motor_DIR_PIN 8
uint16_t motor_speed = 15;// скорость мотора
uint16_t motor_Hz = 6400 / 5 / 10; // 6400 пульсация 5 секунд со скоростью 10
void setup() {
Serial.begin(9600);
pinMode(Motor_DIR_PIN, OUTPUT);
pinMode(Motor_PULSE_PIN, OUTPUT);
}
void loop() {
uint16_t motor_speed_pusk=motor_speed * motor_Hz;
tone(Motor_PULSE_PIN, motor_speed_pusk);
}
Опять я, к вам со своими обзорами, по ЧПУ.
Ну мало ли, может кому и интересно будет, про ЧПУ строение.
Для начала кто не знает, или просто знает такие слова, как контролер, драйвер и опторазвязка. В чем их отличие?
Контролер, есть универсальный, на несколько осей, обычно под небольшие токи, на нем и опторазвязку обычно ставят, релюхи всякие и т.д. и т.п.
Универсальный стоит подороже и если что полетит, то трудней причину искать будет.
Есть более простой контролер, там отсутствуют драйвера. Так как двигатели могут разной мощности быть, ну и под них разные драйвера. Так же на осях различных могут шаговые движки разные стоять. На разный ток.
То есть драйвер. самый нам нужный, чтобы ШД управлять. Там обычно перемычками, переключателями мы и выставляем ток и микрошаг для ШД.
Сейчас драйвера идут почти сплошь, уже с оптронами, то есть с опторазвязкой.
Но кто не знает, по привычке покупает, контролер с опторазвязкой на нем, а к ним уже драйвера подключает.
Я тоже кстати сглупил, заказал такой. Он по хорошему не сильно то и нужен.
Раб. поле я свое знаю, поэтому детали сразу под него разрабатываю. Конечники не сильно и нужны. Включение шпинделя, мне тоже как то не нужно.
Кто его знает, глюканет там контролер и пока я фрезу на мощном фрезере меняю, он возьмет и включится. Пальцы как с куста, улетят.
В общем теории немного, вам дал. Еще немного схемотехники по подключению драйверов на порты.
Есть 2 такие основные схемы подключения.
Китайцы в основном как один первую советуют. Но она не всегда срабатывает.
Я уже писал обзор покупки TB6600, а на самом деле там оказалась TB67S109AFTG. Микруха намного мелкоскопичней чем первая.
И по даташиту вроде как более слабая по току.
Обзор мой здесь mysku.club/blog/aliexpress/41551.html
Там подробно вроде всё обсудили. Поэтому после него я опять заказал драйвера на TB6600, где уже наглядно на фото видно, что стоит именно эта микруха.
Также выбирал, чтобы ток перемеником не накручивать, а то ошибка и спалить можно. Так как есть и такого исполнения, они немного подешевле будут.
А есть закрытого типа, они подороже. Ну и радиатор там помощней.
В общем описываю, что я заказал и получил.
Продавец хороший, быстро отправил и через пару недель, получил на почте, хотя вроде по деньгам и недорого. Был нормальный трек, который всю дорогу бился.
Границу как по маслу проскочил, а также таможню Екатеринбург. Даже удивительно, обычно там «черная яма». Видно от трека зависит.
Пришло в сером пакете, хорошо замотанным скотчем, упаковкой с пупырушками и сами драйвера в картонных коробках, без всяких надписей. Картон хороший.

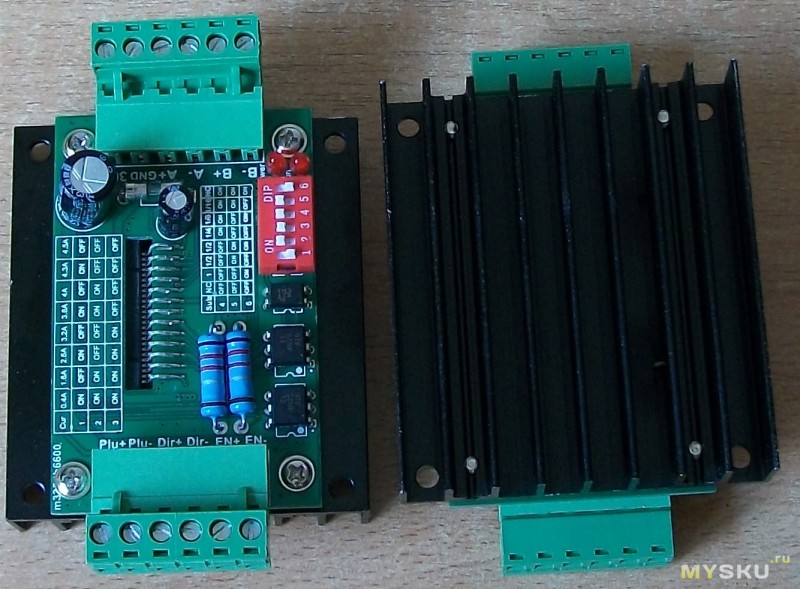
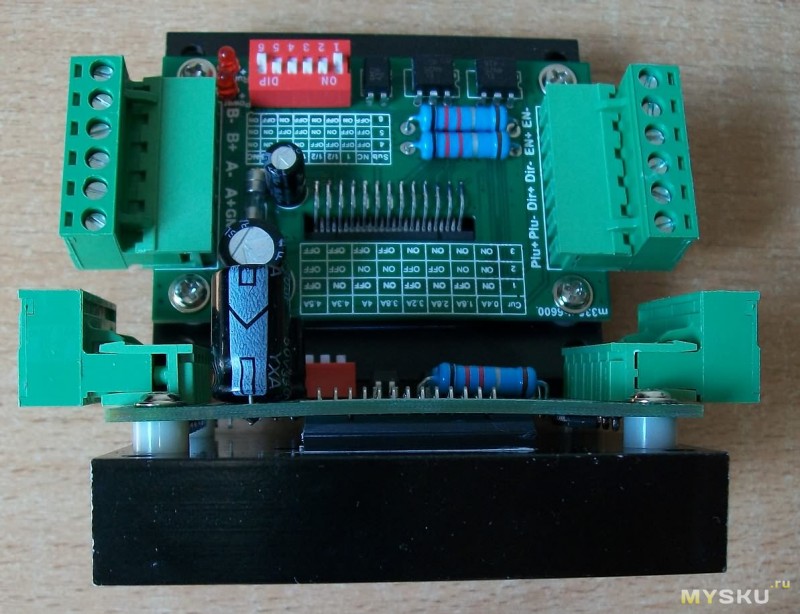
Сами драйвера, неплохо выполненные. Пайка приличная. Емкость немного кривовато стояло на одном. Не стал выправлять.
Термопасты под TB6600 тоже не пожалели, даже с лишком, ваткой лишнее убрал с боков.
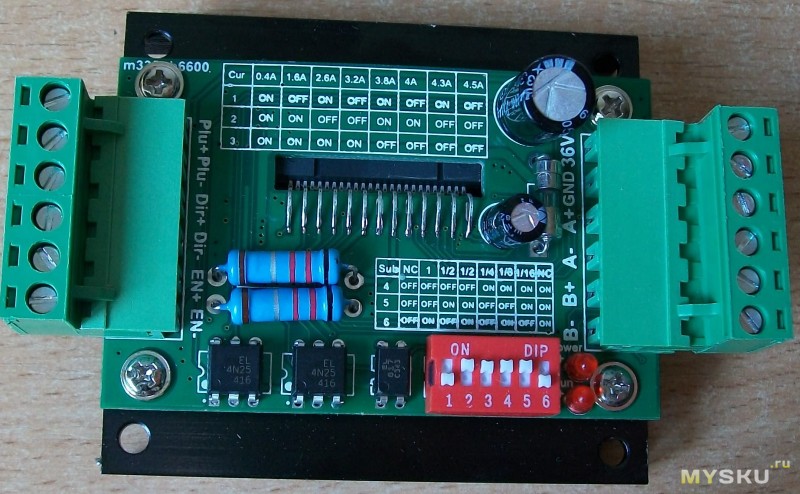
Для любителей рассматривать детали еще вид, крупно. Там и таблица переключателей, чтобы получать различные микрошаги и токи на драйвере.
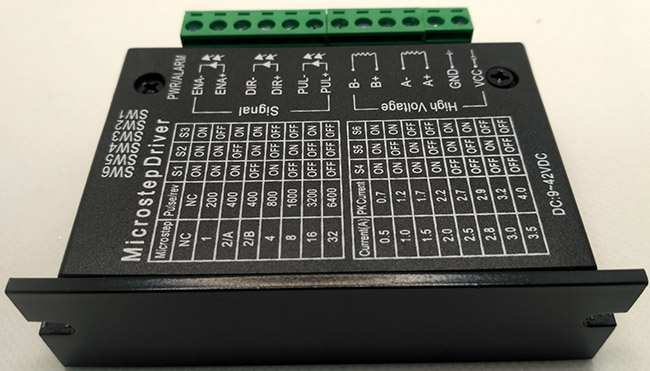
Ну и еще пару вам видов с боку.
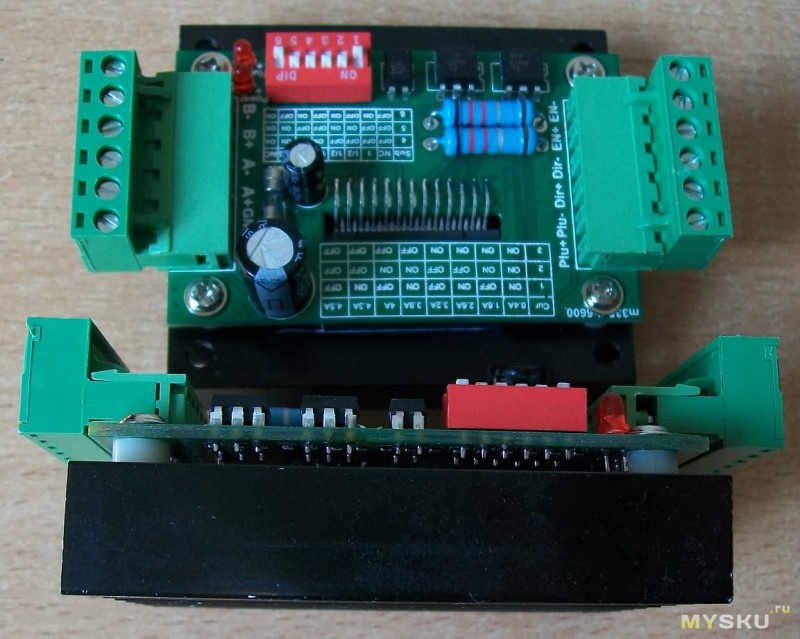
Думаю по самой железке теперь у вас представление есть.
Теорию всё могут и по обзору предыдущему посмотреть и по Инет детали.
Но практика как оказалась, совсем другую картину дает.
Во первых по первым мной заказанным драйверам на TB67S109AFTG, схема подключения которые китайцы дают. То есть вверху №1 Не работает.
Мучился, что только не делал и с подключением и настройками в Масн.
Крутила зараза лишь в одну сторону. Пока не подключил по схеме №2.
Тогда всё стало на свои места и заработало как положено.
Единственно опасаюсь на драйвере ток больше 2.6А давать. Хотя схему охлаждения по своему переделал. Заводская совсем не вдохновила.
Так вот сегодня пробывал и первые драйвера и вторые, на одних и тех же режимах. То есть ток 2.6А и микрошаг 1/16
И здесь все теории и даташиты к чертям просто полетели.
Первый заказанный драйвер, просто шуршит осями. А вот второй на оригинальной TB6600 скрип, дерганье какое то. Чувствуется, что движок как бы рывками крутит.
Вот вам и Термобутерброд. Он то оказался намного лучше.
Конечно ещё нужно поэксперементировать. Но уже видно. Так как перекидывал оси, один шепчет, другой скрипит.
Вот такие пироги. Всем Долгих лет жизни и удачи.
Спрашиваем не стесняемся. Любители минусовать, имейте все же хоть немного совести, прежде чем по кнопке тыкать.
Предупреждение тем кто будет покупать вообще драйвера.
Не знаю почему, но обычно драйвера когда получаете, выставлены на максимальные токи. Поэтому, если не глянете, и быстро подключите движок, то можете Джина получить в виде дымка.
Также переключатели, смотря какого исполнения, совсем не у всех ON вверху находиться, у некоторых наоборот вниз нужно переключить.
Будьте Внимательны!!! Джин не дремлит.
Ну и бонусы.
Бонусы от меня

TB6600%20User%20Guide%20V1.2
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 11
www.DFRobot.com TB6600 Stepper Motor Driver User Guide Version: V1.2 www.DFRobot.com Contents 1. Introduction............................................................................................................................... 1 Features:...................................................................................................................................1 Electric Specification:............................................................................................................1 INPUT & OUTPUT:................................................................................................................ 2 2. Stepper Motor Wiring:............................................................................................................ 4 3. Microcontroller Connection Diagram:................................................................................ 5 4. DIP Switch................................................................................................................................... 6 Micro Step Setting................................................................................................................ 6 Current Control Setting....................................................................................................... 6 5. Off-line Function (EN Terminal):........................................................................................... 7 6. FAQ............................................................................................................................................... 7 7. Dimension (96*56*33)............................................................................................................. 8 www.DFRobot.com Safety Precautions: Before using this product, please read this instruction manual carefully Keep this manual in a safe place for future reference The appearance of the picture is just for reference, please prevail in kind This device is driven by DC power supply, make sure the power positive and negative before you power it. Please do not electrified plug Please do not mix conductive foreign matter such as screws or metal Please keep it dry, and pay attention to moisture-proof The equipment should be clean and well ventilated. www.DFRobot.com 1. Introduction This is a professional two-phase stepper motor driver. It supports speed and direction control. You can set its micro step and output current with 6 DIP switch. There are 7 kinds of micro steps (1, 2 / A, 2 / B, 4, 8, 16, 32) and 8 kinds of current control (0.5A, 1A, 1.5A, 2A, 2.5A, 2.8A, 3.0A, 3.5A) in all. And all signal terminals adopt high-speed optocoupler isolation, enhancing its anti-high-frequency interference ability. Features: ※ Support 8 kinds of current control ※ Support 7 kinds of micro steps adjustable ※ The interfaces adopt high-speed optocoupler isolation ※ Automatic semi-flow to reduce heat ※ Large area heat sink ※ Anti-high-frequency interference ability ※ Input anti-reverse protection ※ Overheat, over current and short circuit protection Electrical Specification: Input Current 0~5.0A Output Current 0.5-4.0A Power (MAX) 160W Micro Step 1, 2/A, 2/B, 4, 8, 16, 32 Temperature -10~45℃ Humidity No Condensation Weight 0.2 kg Dimension 96*56*33 mm www.DFRobot.com.cn 1 www.DFRobot.com INPUT & OUTPUT: Signal Input: PUL+ Pulse + PUL- Pulse - DIR+ Direction + DIR- Direction - EN+ Off-line Control Enable + EN- Off-line Control Enable - Motor Machine Winding: A+ Stepper motor A+ A- Stepper motor A- B+ Stepper motor B+ B- Stepper motor B- Power Supply: VCC VCC (DC9-42V) GND GND Wiring instructions There are three input signals in all: ① Step pulse signal PUL +, PUL-; ② Direction signal DIR +, DIR-; ③ off-line signal EN +, EN-. The driver supports common-cathode and common-anode circuit, you can select one according to your demand. Common-Anode Connection: Connect PUL +, DIR + and EN + to the power supply of the control system. If the power supply is + 5V, it can be directly connected. If the power supply is more than + 5V, the current limiting resistor R must be added externally. To ensure that the controller pin can output 8 ~ 15mA current to drive the internal optocoupler chip. Pulse signal connects to PUL-; direction signal connects to Dir- ; Enable signal connects to EN-. As shown below: www.DFRobot.com.cn 2 www.DFRobot.com Common-Cathode Connection: Connect PUL -, DIR - and EN - to the ground terminal of the control system. Pulse signal connects to PUL-; direction signal connects to Dir- ; Enable signal connects to EN-. As shown below: Note: When“EN”is in the valid state, the motor is in a free states (Off-line mode). In this mode, you can adjust the motor shaft position manually. When“EN”is in the invalid state, the motor will be in an automatic control mode. www.DFRobot.com.cn 3 www.DFRobot.com 2. Stepper Motor Wiring: Two-phase 4-wire, 6-wire, 8-wire motor wiring, as shown below: www.DFRobot.com.cn 4 www.DFRobot.com 3. Microcontroller Connection Diagram: This is an example for the common-anode connection. (“EN”not connected ) Note: Please cut off the power when you connect the system, and ensure the power polar is correct. Or it will damage the controller. www.DFRobot.com.cn 5 www.DFRobot.com 4. DIP Switch Micro Step Setting The follow tablet shows the driver Micro step. You can set the motor micro step via the first three DIP switch. Step Angle = Motor Step Angle / Micro Step E.g. An stepper motor with 1.8° step angle,the finial step angle under “Micro step 4” will be 1.8°/4=0.45° Micro Step Pulse/Rev S1 S2 S3 NC NC ON ON ON 1 200 ON ON OFF 2/A 400 ON OFF ON 2/B 400 OFF ON ON 4 800 ON OFF OFF 8 1600 OFF ON OFF 16 3200 OFF OFF ON 32 6400 OFF OFF OFF Current Control Setting Current (A) S4 S5 S6 0.5 ON ON ON 1.0 ON OFF ON 1.5 ON ON OFF 2.0 ON OFF OFF 2.5 OFF ON ON 2.8 OFF OFF ON 3.0 OFF ON OFF 3.5 OFF OFF OFF www.DFRobot.com.cn 6 www.DFRobot.com 5. Off-line Function (EN Terminal): If you turn on the Off-line function, the motor will enter a free state. You can adjust the motor shaft freely, and the pulse signal will be no response. If you turn it off, it will be back into automatic control mode Note: Generally, EN terminal is not connected. 6. FAQ 1. Q: If the control signal is higher than 5V, how do I connect? A: You need add a resistor in series 2. Q: After connected the power, why the motor doesn’t work? The PWR Led has been ON. A: Please check the power supply, it must higher than 9V. And make sure the I/O limited current is higher than 5mA 3. Q: How do we know the right order of the stepper motor? A: Please check the motor specification, it show you the right order. Or you can measure it with a multimeter. www.DFRobot.com.cn 7 www.DFRobot.com 7. Dimension (96*56*33) www.DFRobot.com.cn 8
Source Exif Data:
File Type : PDF File Type Extension : pdf MIME Type : application/pdf PDF Version : 1.7 Linearized : No Page Count : 11 Author : Grey_ Comments : Company : Create Date : 2016:10:14 12:08:05+04:08 Creator : WPS Office Modify Date : 2016:10:14 12:08:05+04:08 Producer : Source Modified : D:20161014120805+04'08' Subject : Title : 使用说明 Trapped : false
EXIF Metadata provided by EXIF.tools

Safety Statement
The author of this document is not liable or responsible for any accidents, injuries, equipment damage, property damage, loss of money or loss of time resulting from improper use of electrical or mechanical or software products.
Assembling electrical and mechanical CNC machine components like power supplies, motors, drivers or other electrical and mechanical components involves dealing with high voltage AC (alternating current) or DC (direct current) and other hazardous items which can be extremely dangerous and needs high attention to detail, experience, knowledge of software, electricity, electro-mechanics and mechanics.
BEFORE MAKING ANY CONNECTIONS OR DISCONNECTIONS POWER MUST BE REMOVED FROM THE DEVICE AND THE CONTROLLER. FAILURE TO DO SO WILL VOID ANY AND ALL WARRANTIES.
Before starting please read though all the instructions.
Note : Any Mains power connections must be installed by a Licensed electrician or suitability qualified person.
Errors and omissions excepted
The TB6600 Stepper Motor Driver is a professional two-phase stepper motor driver. It supports speed and direction control. You can set its micro step and output current with 6 DIP switches. There are 7 kinds of micro steps (1, 2 / A, 2 / B, 4, 8, 16) and 8 kinds of current control (0.5A, 1A, 1.5A, 2A, 2.5A, 2.8A, 3.0A, 3.5A) in all. All signal terminals adopt high-speed optocoupler isolation, enhancing its anti-high-frequency interference ability.
| Input Current: | 0-5.0A |
| Output Current: | 0.5-4.0A |
| Power (MAX): | 160W |
| Micro Step: | 1, 2/A, 2/B, 4, 8, 16 |
| Temperature: | -10~45℃ |
| Humidity: | No Condensation |
| Weight: | 0.2 kg |
| Dimensions: | 96x56x33 mm |
Suitable for a variety of small and medium sized automation equipment and instruments, such as: engraving machine, marking machine, cutting machine, laser typesetting, plotters, CNC machine tools, handling the devices.
| PUL+ | Pulse + |
| PUL- | Pulse — |
| DIR+ | Direction + |
| DIR- | Direction — |
| EN+ | Off-line Control Enable + |
| EN- | Off-line Control Enable – |
| A+ | Stepper motor A+ |
| A- | Stepper motor A- |
| B+ | Stepper motor B+ |
| B- | Stepper motor B- |
| VCC | VCC (DC9-42V) |
| GND | GND |
There are three input signals:
| Step pulse signal | PUL +, PUL-; |
| Direction signal | DIR +, DIR-; |
| Enable signal | EN +, EN-. |
The driver supports common-cathode and common-anode circuit, you can select one according to your requirements.
Connect PUL +, DIR + and EN + to the power supply of the control system. If the power supply is + 5V, it can be directly connected. If the power supply is more than +5V, a current limiting resistor R must be added externally to ensure that the controller pin can output 8 — 15mA current to drive the internal optocoupler.

Pulse signal connects to PUL-; direction signal connects to Dir- ; Enable signal connects to EN-. As shown below:

Connect PUL -, DIR — and EN — to the ground terminal of the control system. Pulse signal connects to PUL+; direction signal connects to Dir+ ; Enable signal connects to EN+. As shown below:

Note: When “EN” is in the valid state, the motor is in a free state (Off-line mode). In this mode, you can adjust the motor shaft position manually. When “EN” is in the invalid state, the motor will be in an automatic control mode.
Below is a common-anode connection (“EN” not connected).

Note: Always disconnect the power when making connections and ensure the power polar is correct. Or it will damage the controller.
Two-phase 4-wire, 6-wire, 8-wire motor wiring, as shown below:

The follow table shows the TB6600 Driver Micro step settings. The first 3 DIP switches are used to set the micro steps.
Step Angle = Motor Step Angle / Micro Step
E.g. A stepper motor with a 1.8° step angle, the final step angle under “Micro step 4” will be 1.8°/4=0.45°
| Micro Step | Pulse/Rev | S1 | S2 | S3 |
|---|---|---|---|---|
| NC | NC | ON | ON | ON |
| 1 | 200 | ON | ON | OFF |
| 2/A | 400 | ON | OFF | ON |
| 2/B | 400 | ON | OFF | OFF |
| 4 | 800 | OFF | ON | ON |
| 8 | 1600 | OFF | ON | OFF |
| 16 | 3200 | OFF | OFF | ON |
| NC | NC | OFF | OFF | OFF |
| Current (A) | S4 | S5 | S6 |
|---|---|---|---|
| 0.5 | ON | ON | ON |
| 1 | OFF | ON | ON |
| 1.5 | ON | OFF | ON |
| 2 | OFF | OFF | ON |
| 2.5 | ON | ON | OFF |
| 3 | OFF | ON | OFF |
| 3.5 | ON | OFF | OFF |
| 4 | OFF | OFF | OFF |
If you turn on the Enable / Off-line function, the motor will enter a free state, you will be able to turn the motor shaft freely and any pulse signal will be ignored. If you turn it off, the driver will be in automatic control mode.
Note: Generally, EN terminal is not connected.

