-
Виды интерполяции.
Кроме
указания о выборе абсолютного или
относительного метода программирования
УЧПУ необходима информация о характере
рабочей подачи (линейная или круговая).
При
линейной интерполяции движение в режиме
рабочей подачи осуществляется одновременно
по одной или нескольким осям станка для
получения любой прямой в плоскости.
Существует линейная функциональная
связь между осями.
Интерполятор
вычисляет необходимые промежуточные
точки от исходной точки до заданной
конечной. В традиционных агрегатно-блочных
УЧПУ интерполяторами являются электронные
схемы (аппаратные средства); в УЧПУ типа
CNC
интерполяция реализуется с помощью
внутренних программ (программные
средства).
4.1 Линейная интерполяция при ускоренном перемещении – g00.
Эффект
состоит в том, что запрограммированное
перемещение интерполируется, а движение
к конечной точке осуществляется по
прямой линии с максимальной подачей.
Скорость и ускорение подачи, по крайней
мере, одной оси максимальны. Скорость
подачи других осей контролируется таким
образом, чтобы движение всех осей
завершилось в конечной точке одновременно.
При активной инструкции G00
движение замедляется до нуля в каждом
кадре. При этом выполнение «точного
позиционирования» зависит от инструкций
G161,
G162.
Если же в замедлении скорости подачи
до нуля в каждом кадре необходимости
нет, то вместо G00
используют G200.
Значение максимальной скорости подачи
не программируется, но задается так
называемыми «машинными параметрами»
в памяти системы ЧПУ. Инструкция G00
является модальной, и ее появление
деактивирует G-инструкции
той же группы: G01,
G02,
G03,
G05,
G10-G13,
G73,
G200.
4.2.
Линейная интерполяция на ускоренном
перемещении без замедления до V=0,
— G200.
Эффект
состоит в том, что отсутствует замедление
скорости подачи до нуля в конце каждого
кадра; т.е. нет торможения на стыке
соседних кадров, и процесс интерполяции
продолжается. При этом должны соблюдаться
предусловия: инструкции G61
и G163
пассивны.
Если,
тем не менее, инструкция G61
активна, то, несмотря на G200,
торможение до нуля будет осуществляться
в каждом кадре. Если же активна инструкция
G163,
то характер движения будет определяться
функциями точного позиционирования
(см. инструкции G164
— G166).
Значение
максимальной скорости подачи не
программируют, но задают «машинными
параметрами» в памяти системы ЧПУ.
Инструкция G200
является модальной, и ее появление
деактивирует G-инструкции
той же группы: G00,
G01,
G02,
G03,
G05,
G10-
G13,
G73.
4.3. Линейная интерполяция с предусмотренной скоростью подачи, — g01.
Перемещение
с заданной скорость подачи (в F-слове)
к конечной точке кадра осуществляется
по прямой линии. Все координатные оси
завершают движение одновременно.
Скорость подачи в конце кадра снижается
до нуля, но только если инструкция G08
пассивна. Запрограммированная скорость
подачи является контурной, т. е. значения
подачи для каждой отдельной координатной
оси будут меньше. Значение скорости
подачи обычно ограничивают настройкой
«машинных параметров». Вариант комбинации
слов с инструкцией G01
в кадре: G01_
Х_ Y_
Z_F_.
Особенности использования инструкции
G01:
-
в
любом кадре инструкция G01
может быть представлена вместе с
позиционными данными или без них; -
в
любом кадре инструкция G01
сопровождается F-словом,
если до этого подача не была назначена; -
назначенная
подача остается активной, пока ее
значение не будет переопределено. -
инструкция
G01
является модальной, и ее появление
деактивирует G-
инструкции той же фуппы: GOO,
G02,
G03,
G05,
G10-G13,
G73,
G200.
Фрагмент
программы:


4.4.
Круговая интерполяция. — G02,
G03.
Перемещение в кадре осуществляется по
окружности с контурной скоростью,
заданной в активном
F-слове.
Движение по всем координатным осям
завершается в кадре одновременно; также
и в том случае, когда одна из осей не
принадлежит плоскости круговой
интерполяции. Вдоль этой оси движение
будет линейно интерполируемым, а общая
траектория станет винтовой линией.
Инструкции G02
и G03
модальны и деактивируют другие
G-инструкции
той же группы. Приводы подачи задают
перемещение по окружности с
запрограммированной подачей в выбранной
плоскости интерполяции; при этом G02
определяет движение по часовой стрелке,
a
G03
— против часовой стрелки. Выбор двух
синхронных координатных осей осуществляется
свободно путем выбора плоскости
интерполяции.
При
программировании окружность задают с
помощью ее радиуса или координат ее
центра. Дополнительная опция
программирования окружности определяется
инструкцией G05:
круговая интерполяция с выходом на
траекторию по касательной.
4.4.1
Программирование окружности при помощи
радиуса.
Радиус всегда задают в относительных
координатах; в отличие от конечной точки
дуги, которая может быть задана как в
относительных, так и в абсолютных
координатах.
Используя
положение начальной и конечной точек,
а также и значение радиуса, система ЧПУ
прежде всего определяет координаты
центра окружности. Результатом расчета
могут стать координаты двух точек, ML
MR
, расположенных соответственно слева
и справа от прямой, соединяющей начальную
и конечную точки

Расположение
центра окружности зависит от знака
радиуса; при положительном радиусе
центр будет находиться слева, а при
отрицательном радиусе — справа.
Расположение центра определяется также
инструкциями G02
или G03
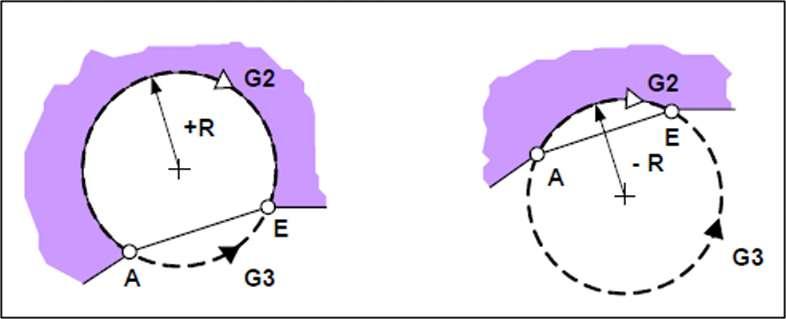
Величина
радиуса должна быть, по крайней мере,
вдвое большей, чем длина отрезка,
соединяющего начальную и конечную точки
дуги окружности. Особым случаем является
равенство отрезка удвоенному значению
радиуса. Этот случай соответствует
заданию полуокружности. Знак радиуса
при этом значения не имеет. Программирование
полной окружности через задание радиуса
недопустимо. Вариант комбинации слов
с инструкцией G03
в кадре: N_G17_G03_X_Y_R±_F_S_M.
Здесь: инструкция G17
означает выбор круговой интерполяции
в плоскости X/Y;
инструкция G03
определяет круговую интерполяцию в
направлении против часовой стрелки;
X_Y_
представляют собой координаты конечной
точки дуги окружности; R
— радиус окружности.
4.2.
Программирование окружности при помощи
координат ее центра.
Текущее положение используется в
качестве начальной точки. Окружность,
заданная координатами центра, проходит
через начальную и конечную ее точки.
Координатные оси, вовлеченные в процесс
круговой интерполяции, имеют параметры
I,
J
и К, приданные осям соответственно.
Параметры устанавливают расстояние
между начальной точкой и центром М дуги
окружности в направлении, параллельном
осям. Знак определяется направлением
вектора от А к М.

I=M(X)-A(X);
J
=M(Y)-A(Y);
K=M(Z)-A(Z);
I,
J,
К — параметры интерполяции; X, Y,
Z
— координатные оси, которым параметры
I,
J,
К
приданы соответственно; М — центр
окружности, заданный относительно
начальной точки дуги окружности. На
рис. 17-21 рассмотрены различные примеры
программирования окружности.
Пример
1:
![]()

Пример
2:
![]()

Пример
3(программирование четверти окружности):
![]()

Пример
4(программирование полуокружности)![]()
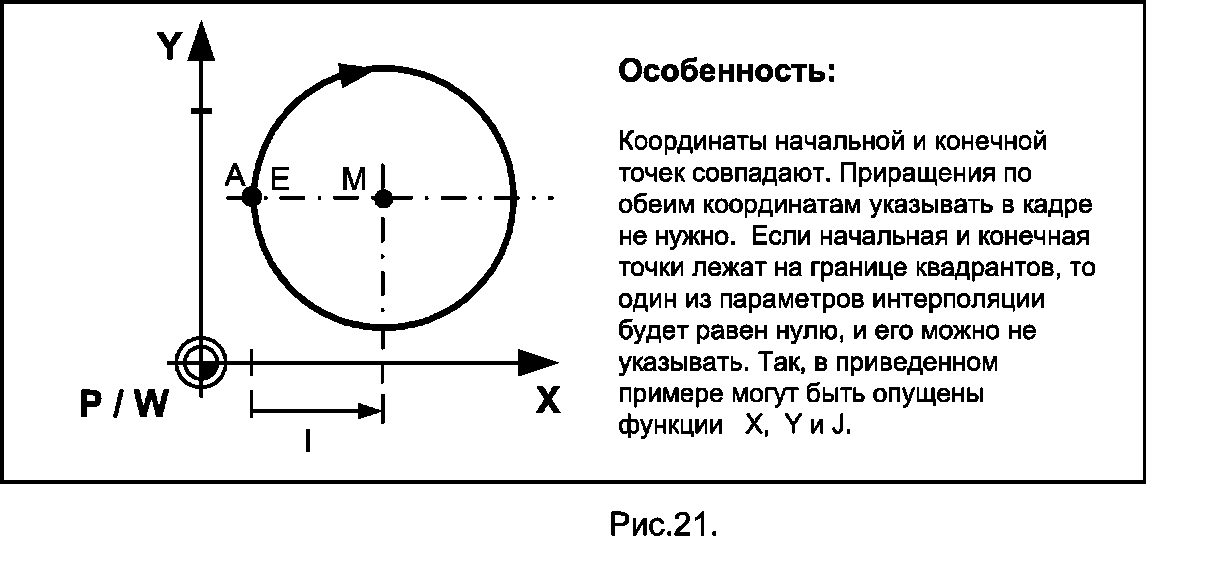
Пример
5(программирование полной окружности):
![]()

Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Современные системы ЧПУ понимают более сотни различных команд, однако в своей повседневной работе технолог-программист использует лишь ограниченный, довольно узкий набор G- и М-кодов. Этому есть простое объяснение. Дело в том, что основная задача УП заключается в перемещении инструмента по заданным координатам. Для реализации таких перемещений нужно воспользоваться всего несколькими кодами, которые можно смело назвать базовыми.
Код G00 используется для ускоренного перемещения. Ускоренное перемещение (позиционирование) необходимо для быстрого перемещения инструмента к позиции обработки или безопасной позиции. Ускоренное перемещение никогда не используется для выполнения обработки, так как скорость движения инструмента слишком высока и непостоянна. Применение кода G00 позволяет существенно снизить общее время обработки.
Подобный материал:
- Привод для станков с чпу, 81.03kb.
- Особенности построения технологических процессов обработки заготовок на станках с чпу, 82.14kb.
- Вид работ №24. 16. «Пусконаладочные работы станков металлорежущих многоцелевых с чпу», 18.43kb.
- Ментов и других изделий, поэтому количество металлорежущих станков, их технический, 250.37kb.
- Балтийский станкостроительный завод промышленная группа компаний, 28.39kb.
- Рассказать об особенностях конструкции токарного или фрезерного станков с чпу, 63.51kb.
- «Разработка технологии изготовления детали «Корпус» с применением станков с чпу и организации, 48.43kb.
- Постпроцессор для любой системы чпу и для устаревшей тоже…, 139.27kb.
- I. Требования к выдаче Свидетельства о допуске к пусконаладочным работам станков металлорежущих, 211.44kb.
- Тема: Предмет, задачи, базовые понятия финансового менеджмента, 423.89kb.
Глава 3. G-инструкции.
1. Линейная интерполяция при ускоренном перемещении, — G00. Эффект состоит в том, что запрограммированное перемещение интерполируется, а движение к конечной точке осуществляется по прямой линии с максимальной подачей. Скорость и ускорение подачи, по крайней мере, одной оси максимальны. Скорость подачи других осей контролируется таким образом, чтобы движение всех осей завершилось в конечной точке одновременно. При активной инструкции G00 движение замедляется до нуля в каждом кадре. При этом выполнение «точного позиционирования» зависит от инструкций G161, G162. Если же в замедлении скорости подачи до нуля в каждом кадре необходимости нет, то вместо G00 используют G200. Значение максимальной скорости подачи не программируется, но задается так называемыми «машинными параметрами» в памяти системы ЧПУ. Инструкция G00 является модальной, и ее появление деактивирует G-инструкции той же группы: G01, G02, G03, G05, G10-G13, G73, G200.
2. Линейная интерполяция на ускоренном перемещении без замедления до V=0, —
G200. Эффект состоит в том, что отсутствует замедление скорости подачи до нуля в
конце каждого кадра; т.е. нет торможения на стыке соседних кадров, и процесс
интерполяции продолжается. При этом должны соблюдаться предусловия: инструкции
G61 nG163 пассивны.
Если, тем не менее, инструкция G61 активна, то, несмотря на G200, торможение до нуля будет осуществляться в каждом кадре. Если же активна инструкция G163, то характер движения будет определяться функциями точного позиционирования (см. инструкции G164 — G166).
Значение максимальной скорости подачи не программируют, но задают «машинными параметрами» в памяти системы ЧПУ. Инструкция G200 является модальной, и ее появление деактивирует G-инструкции той же группы: GOO, G01, G02, G03, G05, G10-G13, G73.
3. Линейная интерполяция с предусмотренной скоростью подачи, — G01.
Перемещение с заданной скорость подачи (в F-слове) к конечной точке кадра осуществляется по прямой линии. Все координатные оси завершают движение одновременно. Скорость подачи в конце кадра снижается до нуля, но только если инструкция G08 пассивна. Запрограммированная скорость подачи является контурной, т. е. значения подачи для каждой отдельной координатной оси будут меньше. Значение скорости подачи обычно ограничивают настройкой «машинных параметров». Вариант комбинации слов с инструкцией G01 в кадре: G01_ Х_ Y_ Z_F_. Особенности использования инструкции G01:
-

в любом кадре инструкция G01 может быть представлена вместе с позиционными данными или без них; - в любом кадре инструкция G01 сопровождается F-словом, если до этого подача не была назначена;
- назначенная подача остается активной, пока ее значение не будет переопределено.
- инструкция G01 является модальной, и ее появление деактивирует G-инструкции той же группы: GOO, G02, G03, G05, G10-G13, G73, G200.

4. Круговая интерполяция, — G02, G03. Перемещение в кадре осуществляется по окружности с контурной скоростью, заданной в активном
F-слове. Движение по всем координатным осям завершается в кадре одновременно; также и в том случае, когда одна из осей не принадлежит плоскости круговой интерполяции. Вдоль этой оси движение будет линейно интерполируемым, а общая траектория станет винтовой линией. Инструкции G02 и G03 модальны и деактивируют другие G-инструкции той же группы. Приводы подачи задают перемещение по окружности с запрограммированной подачей в выбранной плоскости интерполяции; при этом G02 определяет движение по часовой стрелке, a G03 — против часовой стрелки. Выбор двух синхронных координатных осей осуществляется свободно путем выбора плоскости интерполяции.
При программировании окружность задают с помощью ее радиуса или координат ее центра. Дополнительная опция программирования окружности определяется инструкцией G05: круговая интерполяция с выходом на траекторию по касательной (см. далее).
4.1 Программирование окружности при помощи радиуса. Радиус всегда задают в относительных координатах; в отличие от конечной точки дуги, которая может быть задана как в относительных, так и в абсолютных координатах.
Используя положение начальной и конечной точек, а также и значение радиуса, система ЧПУ прежде всего определяет координаты центра окружности. Результатом расчета могут стать координаты двух точек, ML MR (см. рис.14), расположенных соответственно слева и справа от прямой, соединяющей начальную и конечную точки.
Расположение центра окружности зависит от знака радиуса; при положительном радиусе центр будет находиться слева, а при отрицательном радиусе — справа. Расположение центра определяется также инструкциями G02 или G03 (см. рис.15).
4
7 G3
Как это видно из рис.15, величина радиуса должна быть, по крайней мере, вдвое большей, чем длина отрезка, соединяющего начальную и конечную точки дуги окружности. Особым случаем является равенство отрезка удвоенному значению радиуса. Этот случай соответствует заданию полуокружности. Знак радиуса при этом значения не имеет. Программирование полной окружности через задание радиуса недопустимо. Вариант комбинации слов с инструкцией G03 в кадре: N_G17_G03_X_Y_R±_F_S_M. Здесь: инструкция G17 означает выбор круговой интерполяции в плоскости X/Y; инструкция G03 определяет круговую интерполяцию в направлении против часовой стрелки; X_Y_ представляют собой координаты конечной точки дуги окружности; R — радиус окружности.
4.2. Программирование окружности при помощи координат ее центра. Текущее положение используется в качестве начальной точки. Окружность, заданная
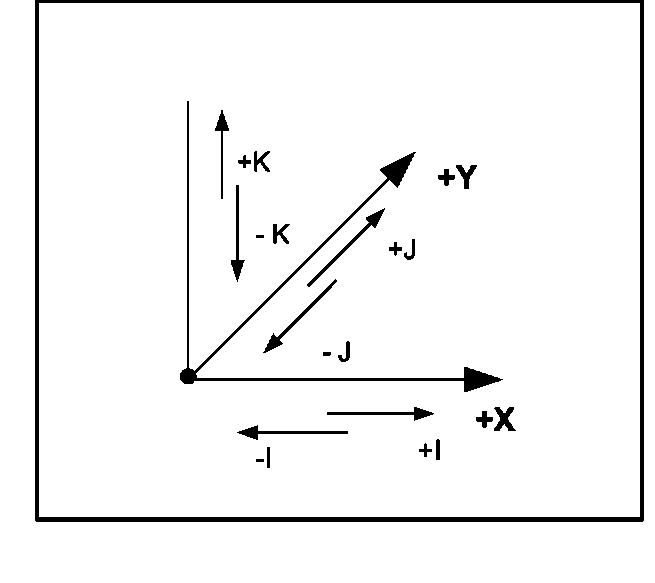
координатами центра, проходит через начальную и конечную ее точки. Координатные оси, вовлеченные в процесс круговой интерполяции, имеют параметры I, J и К, приданные осям соответственно. Параметры устанавливают расстояние между начальной точкой и центром М дуги окружности в направлении, параллельном осям. Знак определяется направлением вектора от А к М. Стандартное определение параметров указано на рис.16.
* А
Рис.16.
На рис.16: l=M(X)-A(X); J =M(Y)-A(Y); K=M(Z)-A(Z); I, J, К — параметры интерполяции; X, Y, Z — координатные оси, которым параметры I, J, К приданы соответственно; М -центр окружности, заданный относительно начальной точки дуги окружности. На рис. 17-21 рассмотрены различные примеры программирования окружности. Пример 1:
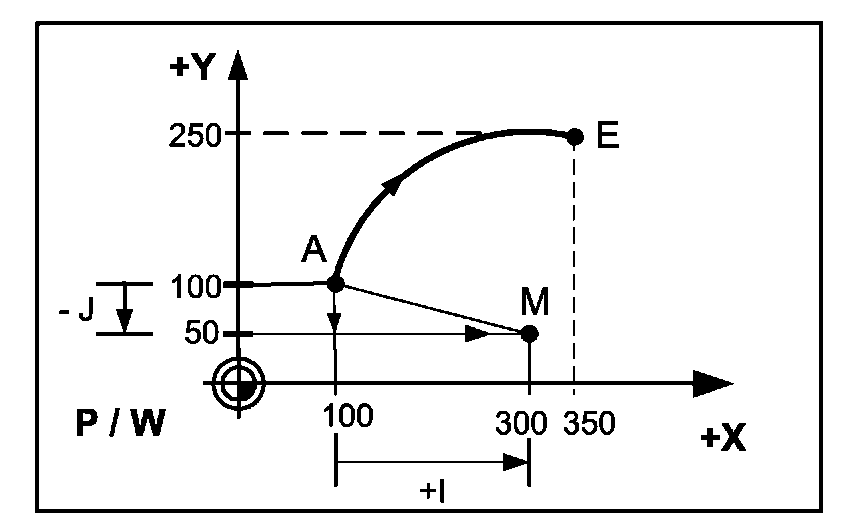
Рис.17.
Пример 2:
N.. .G90 G17 G02 Х350 Y2501200 J-50 F.. .S.. .М…
N.. .G90 G17 G03 Х350 Y2001-50 J200 F.. .S.. .М…
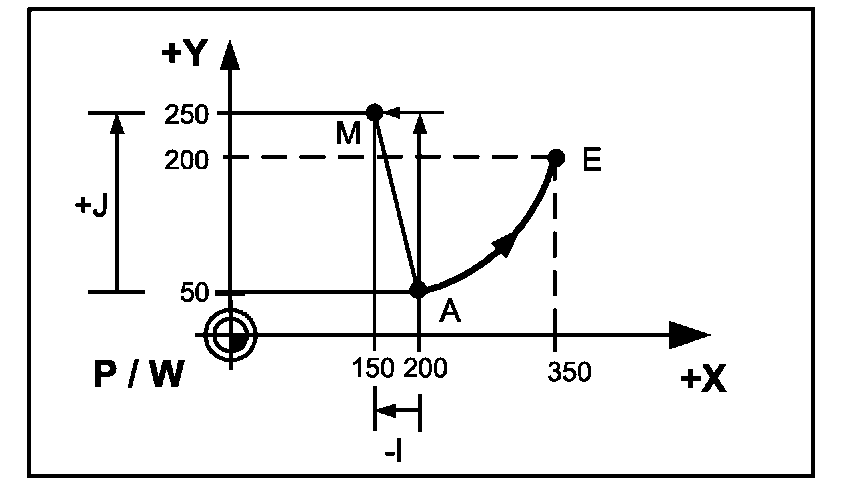
Рис.18.
Пример 3 (программирование четверти окружности):
N.. .G17 G02 X.. .Y.. J-. ..F…S…M…
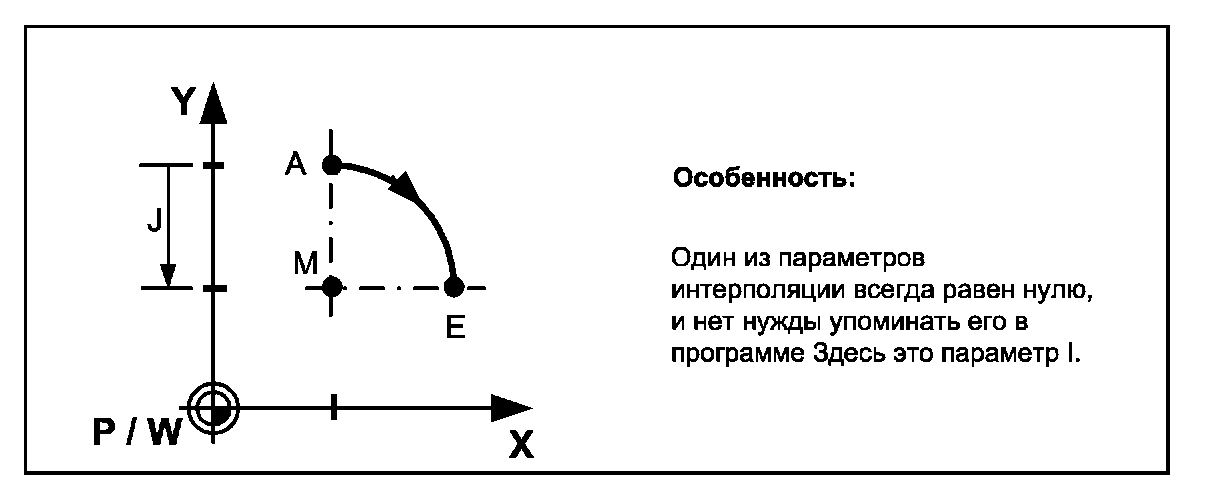
Рис.19
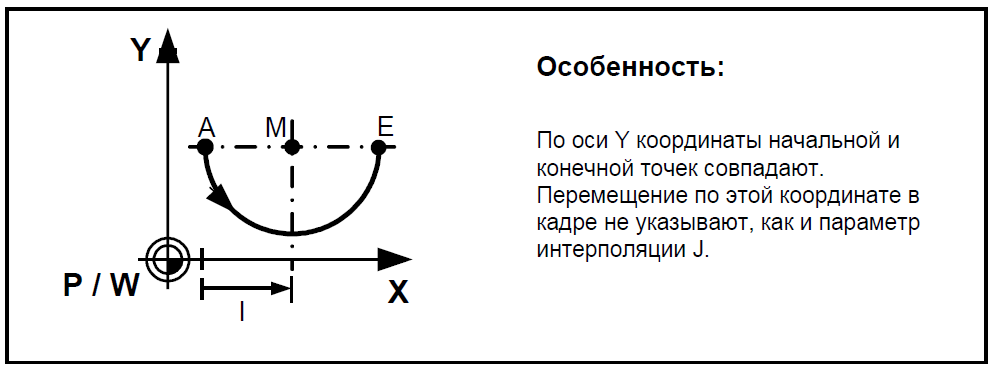
Пример 4 (программирование полуокружности):
Пример 5 (программирование полной окружности):
N…G17…G02I…F…S…M.
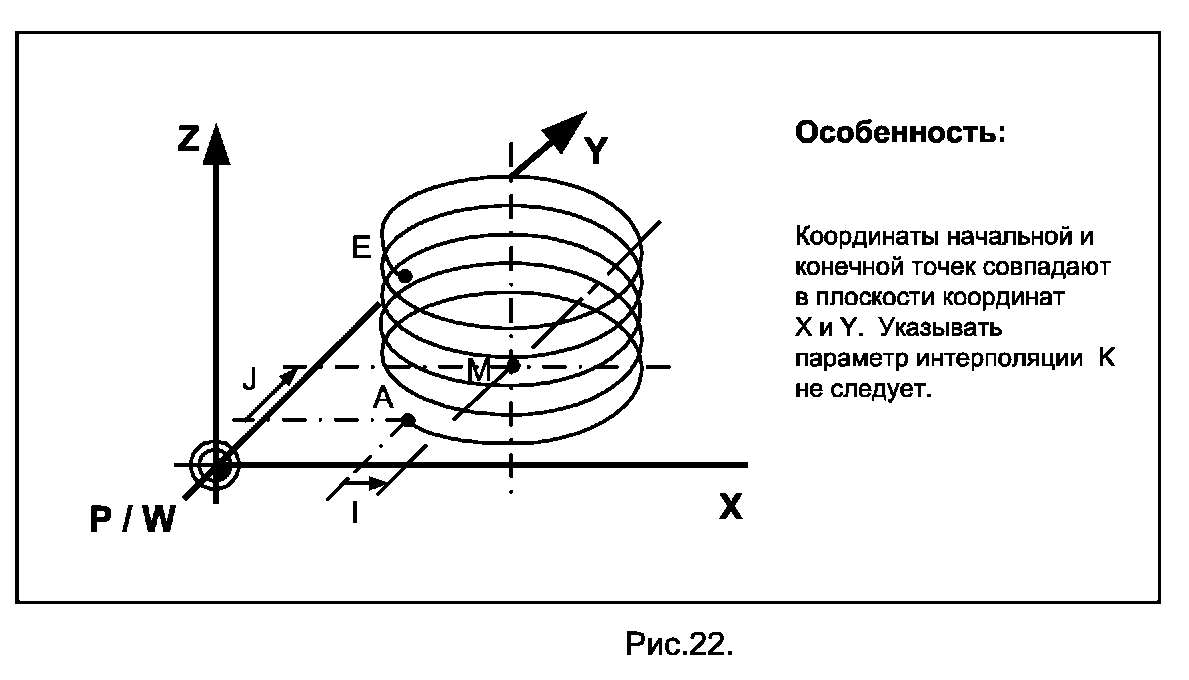
5. Винтовая N-интерполяция, — G202, G203. В процессе винтовой N-интерполяции осуществляется круговая интерполяция в выбранной плоскости и линейная интерполяция для остальных синхронных координатных осей, общим числом до шести круговых или линейных осей. Это связано с тем, что общее число синхронных осей в одном канале не превышает восьми. Движение по всем координатам завершается одновременно. Винтовая N-интерполяция является обобщением простой винтовой, при которой линейная интерполяция осуществляется только для одной оси, перпендикулярной выбранной плоскости круговой интерполяции. Плоскость круговой интерполяции определяется инструкциями G17, G18, G19, G20. В одном кадре может быть запрограммирована только одна полная окружность. Скорость подачи является контурной; однако есть некоторые особенности для линейно интерполируемых осей, связанные с использованием инструкций G594 и G595. Движение по окружности по часовой стрелке осуществляется соответственно инструкции G202; движение по окружности против часовой стрелки осуществляется соответственно инструкции circular G203. Программирование окружности возможно с использованием радиуса и координат центра окружности.
Инструкция винтовой интерполяции является модальной и принадлежит второй группе модальных G-инструкций.
Пример простой винтовой интерполяции показан на рис. 22:
N.. .G91 G17 G03 X…Y…Z…I…J.. .F. ..S…M…
6. Выдержка времени, — G04. Инструкция G04 указывает на сам факт выдержки
времени, а в слове F задают величину этой выдержки в секундах. Действие инструкции
распространяется только на один кадр. В этом же кадре можно программировать
вспомогательные функции (например, смену инструмента), но не перемещения.
Движение приводов подачи останавливается, а вращение шпинделя не выключается.
Пример программирования выдержки времени:
N… G04 F… /Выдержка времени в секундах.
Повторную выдержку времени следует программировать в очередном кадре.
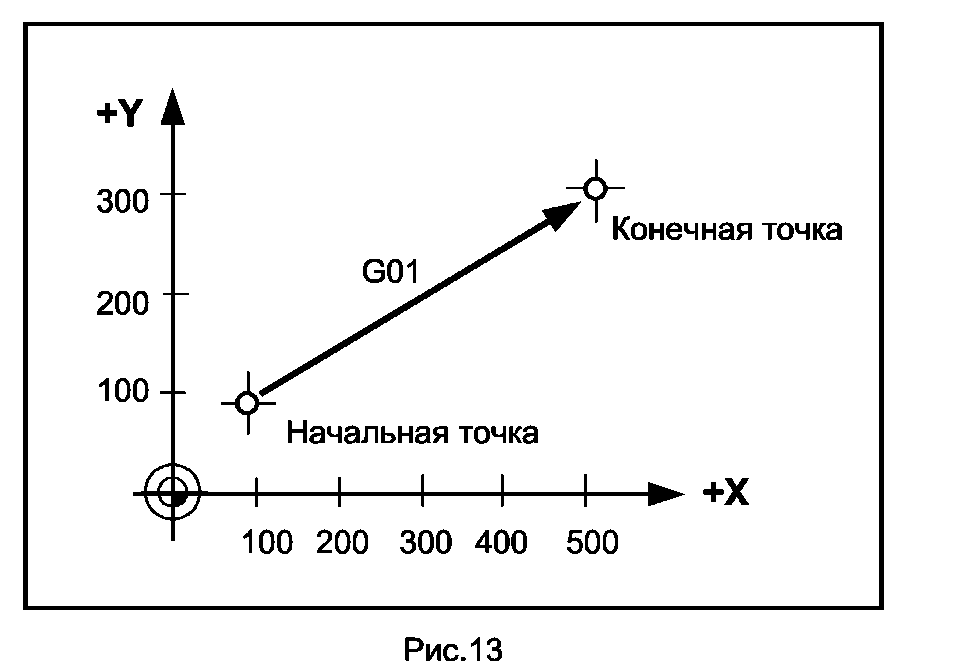
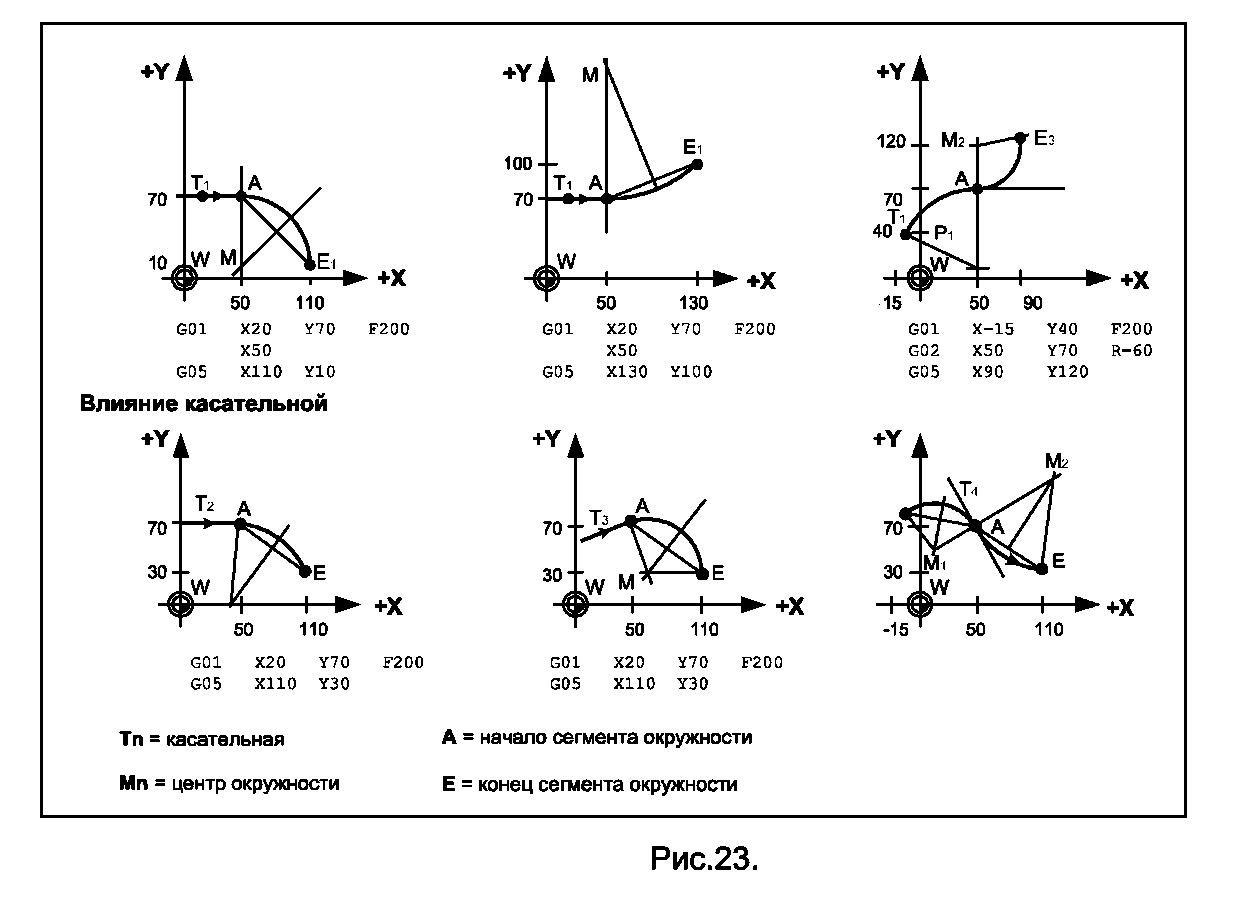
7. Круговая (винтовая) интерполяция с выходом на круговую траекторию по
касательной, — G05. Система ЧПУ использует инструкцию G05 для расчета такого
кругового участка, выход на который из предыдущего кадра (с линейной или круговой
интерполяцией) осуществляется по касательной. Параметры формируемой дуги
определяются автоматически; т.е. программируется только ее конечная точка, а радиус
не задается: G5 X…Y… Различные примеры программирования с инструкцией G05
показаны на рис.23.
8. Программирование ускорения, — G06, G07, G206. Максимальные значения ускорения по каждой координатной оси устанавливают в «машинных параметрах». Временно эти значения могут быть снижены инструкцией G06.
Инструкция G06, сопровождаемая адресами осей, заменяет для этих осей максимальные значения ускорения на те, которые указаны в функциях осей. Эти значения интерпретируются системой управления как «тысячи Дюймов/Сек2» или как «М/Сек2», в зависимости от выбора единиц измерения инструкциями G71, G70 соответственно. Желательно программировать инструкцию G06 в отдельном кадре. Инструкция G07 отменяет введенные изменения для всех осей сразу, т.е. значения соответствующих «машинных параметров восстанавливаются. Инструкцию G07 можно применять одновременно с программированием перемещений.
Инструкцией G206 сохраняют во внутренней памяти системы ЧПУ действующие
максимальные значения ускорения для всех координатных осей.
Инструкция G06, не сопровождаемая адресами осей, вновь активизирует
максимальные значения ускорения, сохраненные во внутренней памяти системы ЧПУ.
Использование инструкций поясняется двумя примерами.
Пример 1:
G06 Х2 Y2 /Максимальное значение ускорения для осей X и Y равно /2М/Сек2.
2Б»
Пример 2: первоначально максимальное ускорение 8М/Сек2 задано в машинных параметрах для всех координатных осей.
| G06 Х1.0 Z2.1 /Максимальное ускорение для оси X равно 1.0 М/Сек2; | |
| … | /максимальное ускорение для оси Y равно 8.0 М/Сек2; |
| / максимальное ускорение для оси Z равно 2.1 М/ Сек2. | |
| G206 | /Запоминание текущих максимальных значений ускорения. |
| G07 | / Активизация значений, сохраненных в машинных параметрах: |
| … | /максимальное ускорение для оси X равно 8.0 М/ Сек2; |
| /максимальное ускорение для оси Y равно 8.0 М/ Сек2; | |
| /максимальное ускорение для оси Z равно 8.0 М/ Сек2. | |
| G06Y5 | /Максимальное ускорение для оси X равно 8.0 М/Сек2; |
| … | /максимальное ускорение для оси Y равно 5.0 М/ Сек2; |
| /максимальное ускорение для оси Z равно 8.0 М/ Сек2. | |
| G06 | /Максимальное ускорение для оси X равно 1.0 М/Сек2; |
| … | /максимальное ускорение для оси Y равно 8.0 М/ Сек2; |
| / максимальное ускорение для оси Z равно 2.1 М/ Сек2. |
9. Управление скоростью подачи в «точках перегиба» траектории, — G08, G09.
Указанные инструкции поддерживают контурную скорость подачи вдоль сложной траектории настолько постоянной, насколько это возможно. Если подобное управление выключено, то скорость подачи снижается до нуля в конце каждого кадра и возрастает до запрограммированного значения в начале каждого кадра. Если подобное управление включено, то скорость подачи будет снижаться до необходимого уровня в точках перегиба контура (за исключением начала и конца процесса обработки), см. рис.24.
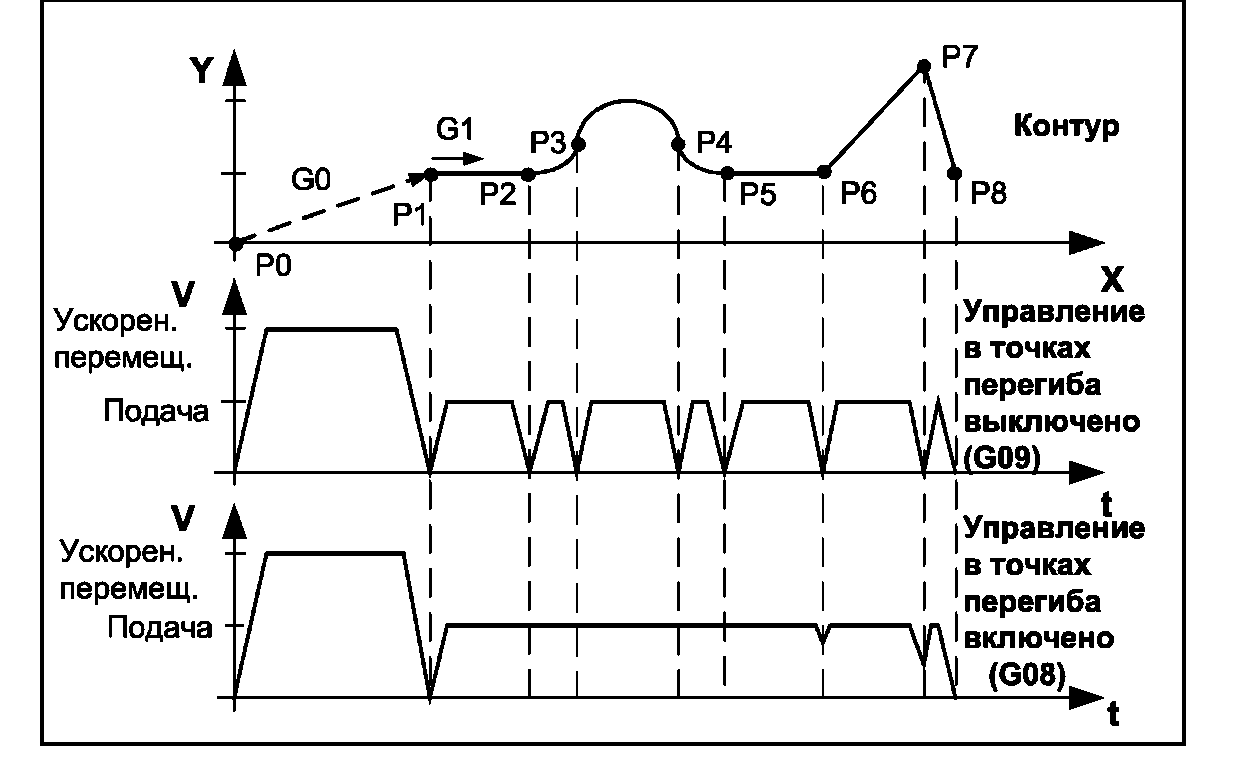
Рис.24.
При активной инструкции G08 (управление в точках перегиба включено) конечная точка Р8 будет достигнута за более короткое время, чем при активной инструкции G09 (управление в точках перегиба выключено). Обе инструкции модальны.
Пример.
| N…G08 | /Управление в точках перегиба включено. |
| N…G0OX100Y50 | /Ускоренное перемещение к точке PL |
| N…G01X150F5000 | /Продолжение движения со скоростью подачи. |
| N… |
10. Управление скоростью подачи в точках перегиба с учетом функции «look-ahead», — G108. Функция «look-ahead» работает в диапазоне числа кадров, установленных в машинных параметрах. Завершение диапазона для инструкции G08 выглядит так же, как и завершение процесса обработки. В этом случае произойдет неоправданное снижение скорости, как это было показано на рис. 24. Инструкция G108 позволяет избежать подобного снижения скорости подачи.
Пример.
G08
| N998 Х1000 | |
| N999G0OX5000G108 | /В конце кадра скорость подачи снизится лишь /до необходимого уровня. |
| NIOOO X5001 | |
| МЗО |
11. Переходы от кадра к кадру без торможения, — G228. Алгоритм управления скоростью подачи в точках перегиба на стыке кадров принимает во внимание величину скорости подачи, максимально допустимый скачок скорости и допустимую длину участка торможения. При этом торможение может произойти даже при незначительных изменениях угла наклона контура, т.е. при квази-гладкой траектории. Инструкция G228 позволяет установить угол излома контура, в пределах которого торможение не происходит. Инструкция программируется следующим образом: G228 {К<угол излома контура>}; где К — адрес функции, в которой указывают максимальный угол в пределах от 0 до 50 градусов.
12. Формирование «гладкого» ускорения при движении от точки к точке, — G408.
Цель состоит в растягивании процедуры ускорения на величину нескольких интерполяционных циклов без скачков скорости подачи. В качестве закона изменения скорости подачи принимают, например, функцию sin2.
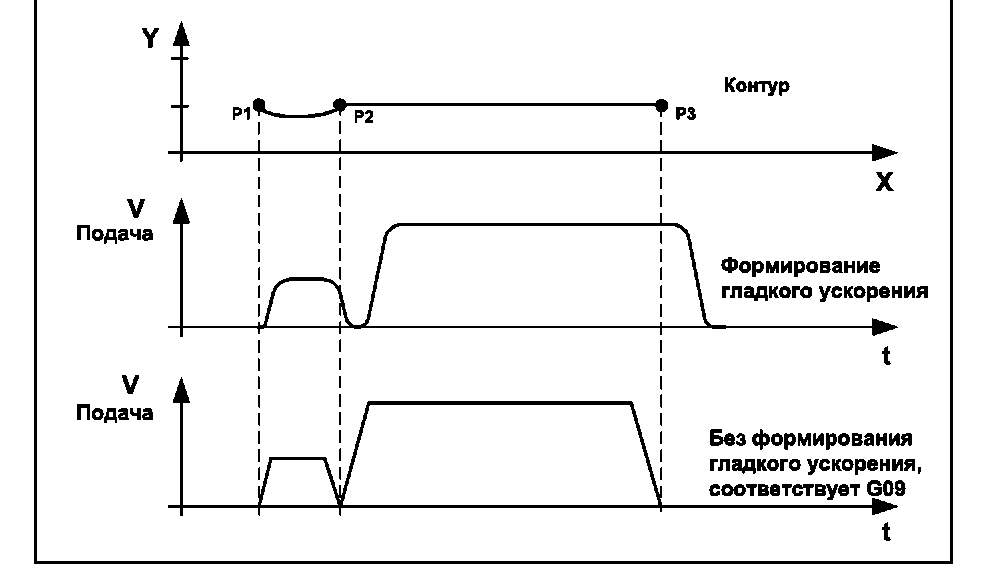
Рис.25.
Параметрами инструкции служат LIN и SIN. Параметр LIN <число> служит признаком линейного изменения ускорения; причем <число> означает количество интерполяционных циклов (от 2 до 40), между которыми распределяется линейное изменение ускорение. Параметр SIN <числовое значение> служит признаком
изменения ускорения соответственно функции sin2; а <числовое значение> является вариантом использования инструкции G408 (см. рис.26):
- SIN 0, формирование ускорения отменяется (эквивалентноСОЭ);
- SIN 3, изменение ускорение охватывает три интерполяционных цикла в отношении 25% — 50% — 25%;
- SIN 4, изменение ускорение охватывает четыре интерполяционных цикла в отношении 12.5% — 37.5% -37.5% -12.5%;
- SIN 5, изменение ускорение охватывает пять интерполяционных циклов;
- SIN 10, изменение ускорение охватывает 10 интерполяционных циклов;
- SIN 15, изменение ускорение охватывает 15 интерполяционных циклов;
- SIN 20, изменение ускорение охватывает 20 интерполяционных циклов;
• SIN 40, изменение ускорение охватывает 40 интерполяционных циклов; Параметр SIN имеет более высокий приоритет, чем параметр LIN.
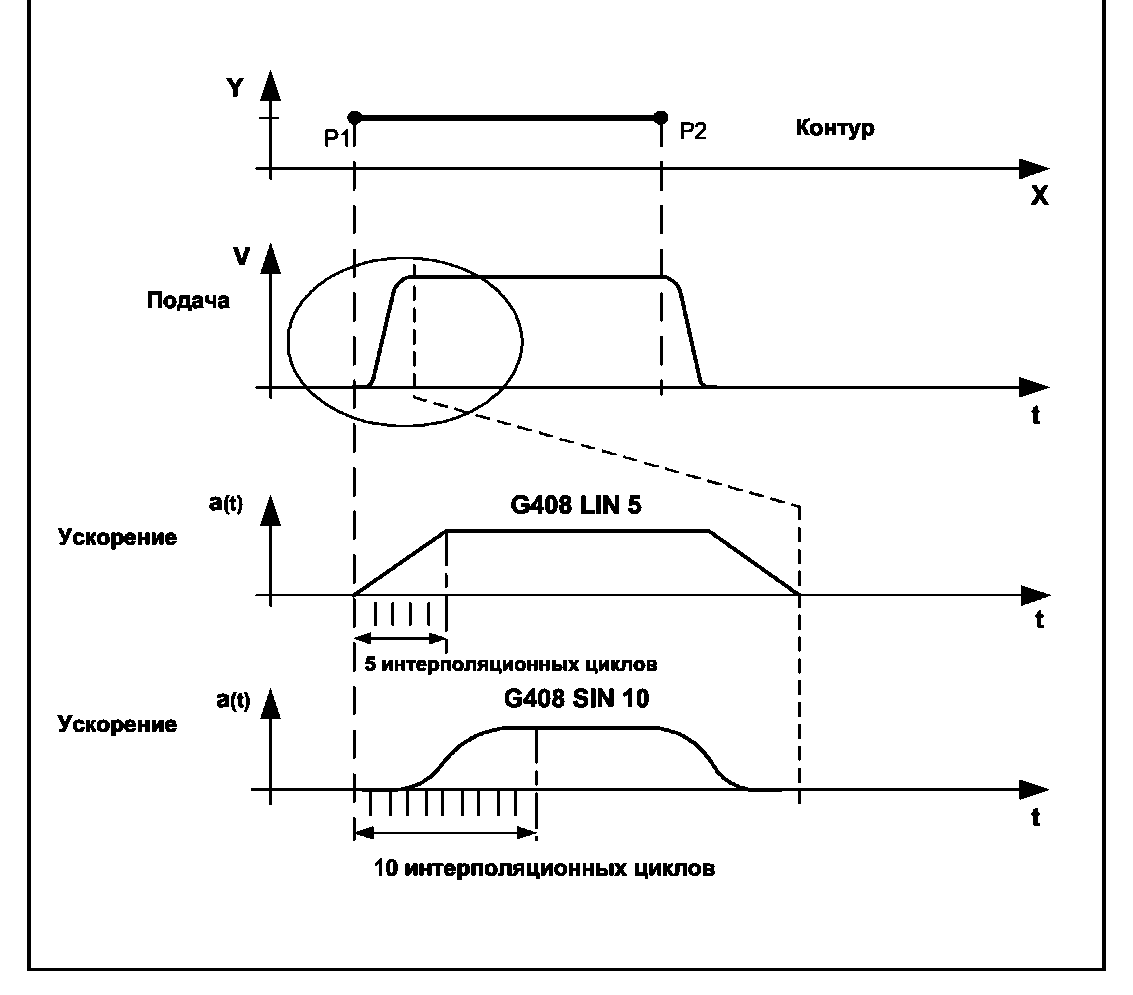
Рис.26.
Примеры корректного использования инструкции G408:
- G408; по умолчанию используется G408 LIN 2.
- G408 SIN 3 LIN 5; изменение ускорения соответствует SIN 3;
- G408 LIN 5; изменение ускорения соответствует LIN 5;
- G408 LIN 2; изменение ускорения соответствует LIN 2.
Инструкция G408 модальная (принадлежит группе инструкций G08, G09, G108, G608).
13. Формирование «гладкого» ускорения при движении от точки к точке для
каждой оси в отдельности, — G608. Ускорение формируется для каждой синхронной
оси независимо. В процессе интерполяции система управления автоматически
определяет общую функцию формирования ускорения.
Синтаксис инструкции: G608 <ось i> < число интерполяционных циклов для формирования ускорения оси >…<ось п> <число интерполяционных циклов для формирования ускорения оси п>.
Пример.
N…G608 Х4 Y6 Z10 /Число интерполяционных циклов для оси X
/равно 4, для оси Y равно 6, для оси Z равно 10.
Примечание:
- инструкции G608, G08 G09 G408 являются модальными и прекращают действие других из той же группы;
- число интерполяционных циклов может быть назначено от 1 до20;
- для неупомянутых осей принимается число интерполяционных циклов, заданное в машинных параметрах;
- если инструкция G608 не сопровождается перечислением осей, то для них всех принимается число интерполяционных циклов, заданное в машинных параметрах;
- инструкция G608 предполагает торможение до нуля и в этой связи используется при позиционировании.
- при инициализации системы активна инструкция G09.
1. G-коды. G00 – ускоренное перемещение
Код G00 используется для выполнения ускоренного перемещения. Ускоренное перемещение (см. рис. 1), или позиционирование, необходимо для быстрого перемещения режущего инструмента к позиции обработки или к безопасной позиции. Ускоренное перемещение никогда не используется для выполнения обработки, так как скорость движения исполнительного органа станка очень высока и непостоянна. Код G00 отменяется при программировании следующих кодов: G01, G02, G03.
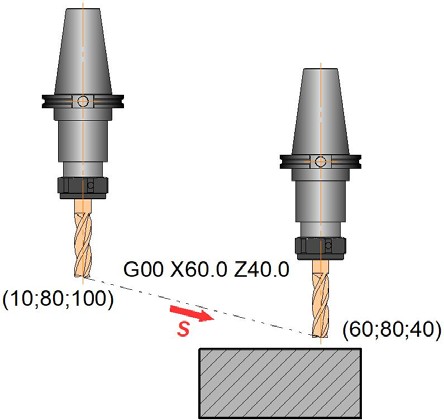
Рис. 1. Графическое изображение ускоренного перемещения.
Пример G00 X60 Z40 – перемещение в позицию с координатами (60; 40)
G01 – линейная интерполяция (см. рис. 2). Код G01 – команда линейной интерполяции, обеспечивающая перемещение инструмента по прямой линии с заданной скоростью. Скорость перемещения указывается F-адресом. Код G01 отменяется с помощью кодов G00, G02HG03.
G02 – круговая интерполяция (дуга в направлении часовой стрелки). Код G02 предназначен для выполнения круговой интерполяции, то есть для перемещения инструмента по дуге (окружности) в направлении часовой стрелки с заданной скоростью. Скорость перемещения указывается F-адресом. Код G02 отменяется с помощью кодов G00, G01 и G03.
G03 – круговая интерполяция (дуга против часовой стрелки). Код G03 предназначен для выполнения круговой интерполяции (см. рис. 2), то есть для перемещения инструмента по дуге (окружности) против часовой стрелки с заданной скоростью.
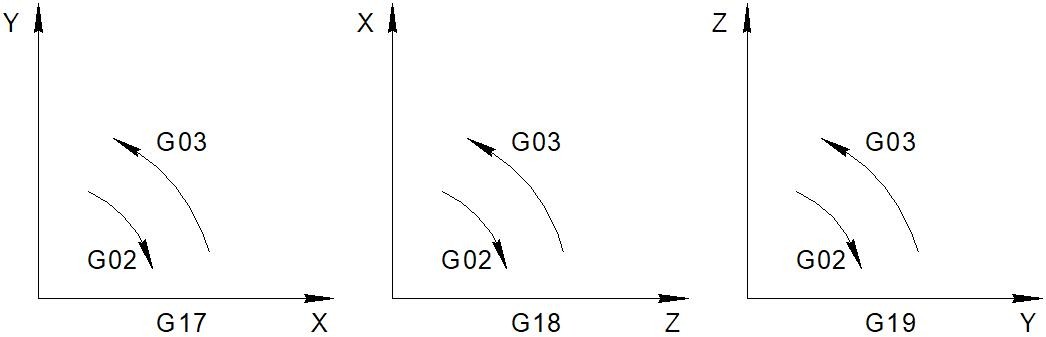
Рис. 2. Круговая интерполяция в разных плоскостях G-коды
Скорость перемещения указывается F-адресом. Код G03 отменяется с помощью кодов G00, G01 и G02.
G04 – выдержка. Код G04 – команда на выполнение выдержки (паузы) с заданным временем. Этот немодальный код программируется вместе с Xили Р-адресом, который указывает длительность времени выдержки. Обычно это время составляет от 0.001 до 99999.999 секунды.
Код G04, Xили Р-адрес программируются вместе в одном кадре, который не содержит никаких перемещений. Если для определения времени выдержки используется Р, то нельзя программировать десятичную точку. Адрес Р определяет время выдержки в миллисекундах, а X – в секундах. Если команда G04 программируется без временного фактора, то она воспринимается системой ЧПУ как немодальная команда для точного останова.
Пример:
G04 Х1.5 – выдержка 1.5 секунды;
G04 Р2000 – выдержка 2 секунды.
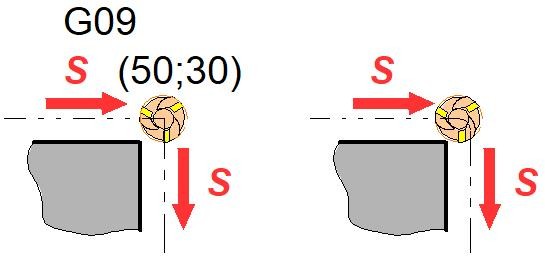
G09 – точный останов. Из-за автоматического ускорения и замедления осевых перемещений исполнительных органов станка с ЧПУ не происходит точная обработка кромок углов при переходе от одного движения резания к другому. Эта неточность обработки выражается в закруглении или притуплении углов.
Предположим, вы обрабатываете прямоугольный контур и стремитесь получить острую кромку в углу (рис. 3 а, б). Если вы работаете в обычном режиме, то возможно, что при переходе от движения по оси Y к движению по оси X произойдет небольшое скругление этой самой кромки (рис. 3 б). Особенно сильно данный эффект проявляется при работе с высокими скоростями подач и на больших обрабатывающих центрах.
а) б)
Рис. 3 Обработка острой (а) и закругленной кромки (б) в правом углу контура заготовки
Немодальный код G09 предназначен для согласования фактической траектории инструмента с запрограммированной траекторией. То есть при переходе от одного движения к другому СЧПУ обеспечит законченное и точное перемещение в указанную координату.
Код G09 обычно указывается вместе с координатой, в которой необходимо выполнить точный останов. Управляющая программа, гарантирующая получение острой кромки правого верхнего угла прямоугольного контура, будет выглядеть следующим образом:
% O0005
N100 G21
N102 G0 G17 G40 G49 G80 G90
N104 T1 M6
N106 G0 G90 G54 X30. Y-22.5 S1000 M3
N108 G43 H1 Z100.
N110 Z10.
N112 G1 Z-2. F100.
N114 Y-12.5
N116 G09 Y17.5
N118 X-25.
N120 X-35.
N122 Z8.
N124 G0 Z100.
N126 M5
N132 M30
%
Когда инструмент приходит в координату Y17.5, то СЧПУ выполняет точный останов. Время выдержки в этой координате определяется значением специального параметра системы. Чуть позже вы познакомитесь с кодом G61, который работает аналогично G09, но является модальным.
G10 – включение режима ввода данных в СЧПУ. Команда G10 позволяет устанавливать или смещать рабочую систему координат и вводить определенные значения в регистры коррекции инструмента памяти СЧПУ при помощи управляющей программы или специальной (отдельной) программы. Если вы хотите ввести какие-либо значения в регистры коррекции при помощи УП, то они должны находиться в начале программы. Этим вы обеспечиваете согласованность значений в регистрах коррекции и самой программы обработки. Обычно для ввода значений в регистры коррекции применяется следующий формат:
G10 L11 P_R_;
где G10 – включение режима ввода данных; L11 – настройка регистра коррекции инструмента; Р – выбор регистра коррекции, который необходимо изменить; R – вводимое значение коррекции. Если команда G10 используется одновременно с кодом G90, то значения в регистрах коррекции переписываются (заменяются новыми значениями). Когда G10 работает вместе с кодом G91, то значения в корректорах складываются (или вычитаются) с числовым значением при R. К примеру, кадр G10 G90 Lll P12 RIOO.05 заменяет существующее значение в регистре коррекции № 12 на новое значение 100.05. Для того чтобы установить или сместить рабочую систему координат, используется следующий формат:
G10 L2 P_X_Y_Z_;
где G10 – включение режима ввода данных; L2 – определение стандартной рабочей системы координат; Р – выбор рабочей системы координат; X, Y, Z – значения, определяющие новое положение рабочей системы координат. Подготовительная функция G10 является модальной и остается активной до тех пор, пока не будет отменена кодом G11. Перед использованием G10 внимательно ознакомьтесь с документацией к станку, так как формат кадра с G10 может быть различным.
G11 – выключение режима ввода данных в СЧПУ. При помощи команды G11 отменяется команда G10 для включения режима ввода данных в СЧПУ.
G15 – выключение режима полярных координат. При помощи команды G15 вы отменяете режим работы в полярной системе координат и возвращаетесь к программированию в прямоугольной системе координат.
G16 – включение режима полярных координат. Подготовительная функция G16 позволяет работать в полярной системе координат (см. рис. 4). При этом запрограммированная позиция определяется углом и расстоянием от нулевой точки рабочей системы координат или от текущей действительной позиции.
Работать в полярной системе координат можно в одной из трех плоскостей. С кодом G17 вы работаете в плоскости XY, с кодом G18 – в плоскости XZ, а с помощью кода G19 – в плоскости YZ.
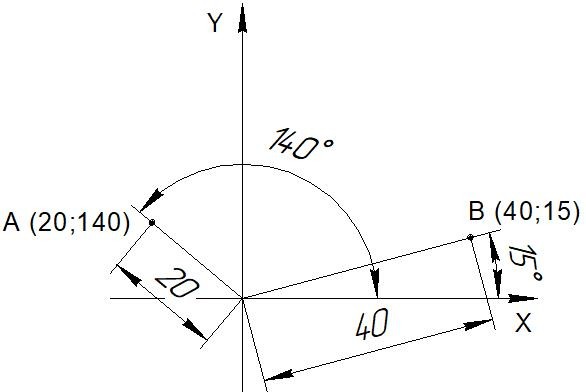
Рис. 4. Полярные координаты: точка А (20;140) и точка В (40; 15)
Если активна плоскость XY, то X-адрес определяет радиус, a Y устанавливает угол относительно оси X. Если активна плоскость XZ, то X-адрес определяет радиус, a Z устанавливает угол относительно оси X. Если активна плоскость YZ, то Y-адрес определяет радиус, a Z устанавливает угол относительно оси Y. Положительным считается угол, который отсчитывается против часовой стрелки.
Полярные перемещения, которые указываются при действующей команде G90, выполняются относительно нулевой точки активной рабочей системы координат. Если же действует код G91, то полярные перемещения выполняются относительно текущей позиции. Значения угла и радиуса могут быть запрограммированы независимо как абсолютные или относительные значения. То есть полярное перемещение может быть одновременно определено углом от нулевой точки рабочей системы координат и расстоянием (радиусом) от текущей позиции.
Нередки случаи, когда на чертежах отверстия указываются при помощи полярных координат. Чтобы не пересчитывать полярные координаты в прямоугольные, можно воспользоваться подготовительной функцией G16.
…
G90 G17 G16
G81 G98 X4 Y30 Z-2 R0.5 F50
Y60
Y90 G15 G80
…
Команда G16 является модальной, поэтому остается активной до тех пор, пока ее не отменят командой G15.
G17 – выбор плоскости XY. Подготовительная функция G17 предназначена для выбора плоскости XY в качестве рабочей (рис. 5).
G18 – выбор плоскости XZ. Подготовительная функция G18 предназначена для выбора плоскости XZ в качестве рабочей (рис. 5).
G19 – выбор плоскости YZ. Подготовительная функция G19 предназначена для выбора плоскости YZ в качестве рабочей (рис. 5).
Плоскость YZ для G17, G18 и G19 становится определяющей при использовании круговой интерполяции, вращения системы координат и постоянных циклов сверления.
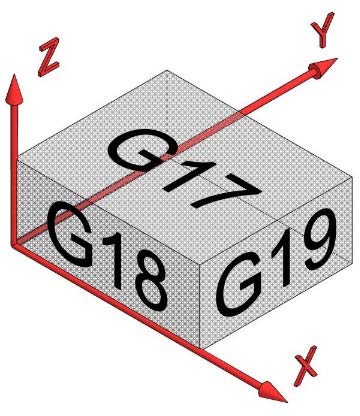
Рис. 5. При выборе активной плоскости в трехмерной системе координат используются корды G17, G18, G19
G20 – ввод дюймовых данных. Код G20 активирует режим работы с дюймовыми данными. Пока действует этот режим, все вводимые данные воспринимаются как дюймовые. Рекомендуется во всех программах, которые написаны в дюймовых размерах, поставить команду G20 в начало программы (в строку безопасности), чтобы в случае, если в программе, выполняемой до этого, действовал метрический режим, обеспечить выбор корректного формата.
Пример:
N10 G20 G40 G49 G54 G80 G90 – код G20 в строке безопасности. Команда является модальной и действует до тех пор, пока ее не отменят командой G21.
G21 – ввод метрических данных. Он активирует режим работы с метрическими данными. Пока действует этот режим, все вводимые данные воспринимаются как метрические. Рекомендуется во всех программах, которые написаны в метрических размерах, поставить команду G21 в начало программы (в строку безопасности), чтобы в случае, если в программе, выполняемой до этого, действовал дюймовый режим, обеспечить выбор корректного формата.
Пример:
N10 G21 G40 G49 G54 G80 G90 – код G21 в строке безопасности. Команда является модальной и действует до тех пор, пока ее не отменят командой G20.
G22 – включение режима предельных перемещений. Код G22 активирует установленный предел перемещений. В этом случае инструмент не может выйти за пределы ограничивающей области. Эта область, как правило, устанавливается с помощью параметров СЧПУ.
G23 – выключение режима предельных перемещений. При выполнении команды G23 установленные пределы перемещений не действуют. То есть код G23 отменяет действие кода G22 и позволяет инструменту перемещаться в любую точку рабочей зоны станка.
G27 – проверка возврата к исходной позиции. Код G27 работает аналогично коду G28 (см. далее). Единственная разница заключается в том, что если позиция, к которой произошло перемещение исполнительного органа, не соответствует исходной позиции, то в случае с G27 система ЧПУ станка выдает аварийное сообщение или сигнал. Команды G27 и G28 могут использоваться в циклах и макросах автоматической смены инструмента. Перед выполнением этих G-кодов обычно отменяют коррекцию инструмента.
G28 – автоматический возврат в исходную позицию. Команда G28 предназначена для возврата станка в исходную позицию. Под этим понимается ускоренное перемещение исполнительных органов в нулевую точку станка. Возврат в исходную позицию предназначен прежде всего для возможности проверки размеров и качества обрабатываемой детали в середине программы обработки. Иногда код G28 ставят в конец управляющей программы, чтобы после ее завершения рабочий стол переместился в положение, удобное для съема обработанной детали.
Условный кадр для автоматического возврата в исходную позицию выглядит так:
G91G28X0.0Y0.0Z0.0
Если в кадре с G28 указываются оси X, Y и Z с нулевыми значениями, то возврат в исходную позицию происходит по этим трем осям. Однако не всегда нужно выполнять эту операцию со всеми осями. Возможно, что потребуется перемещение только по двум из них. Например, для возврата по осям Z и Y в программе обработки должен стоять следующий кадр:
G91 G28 Y0.0. Z0.0 G-коды
Необходимо обратить особое внимание на находящийся в кадре код G91. Известно, что этот код активирует работу в относительных координатах. Дело в том, что G28 позволяет запрограммировать некоторую промежуточную точку, в которую будет совершено перемещение, перед тем как станок вернется в исходную позицию. На самом деле координаты, указанные в кадре, являются координатами именно промежуточной точки.
В приведенных ранее примерах указаны в качестве координат промежуточной точки нулевые значения. Так как в кадре стоит код относительных координат G91, то станок должен переместиться относительно текущей позиции на нуль миллиметров по каждой из осей. То есть не должен никуда двигаться. Вот поэтому при наличии в управляющей программе (УП) кадра G91 G28 Х0.0 Y0.0 Z0.0 станок будет сразу возвращен в исходную позицию без «заезда» в промежуточную точку.
Если в программе обработки находится кадр G91 G28 Х10.0 Z20.0, то станок сначала переместится вправо и вверх, а только затем вернется в нулевую точку (см. рис. 6). Для чего нужна эта промежуточная точка? Код G28 вызывает ускоренное перемещение, аналогичное G00, а в этом случае оно может быть непрямолинейным. То есть можно запросто что-нибудь «зацепить». Опытный программист старается сначала поднять инструмент вверх, а уже затем «отпустить» станок в нулевую точку: G91 G28 Х0.0 Y0.0 Z20.0
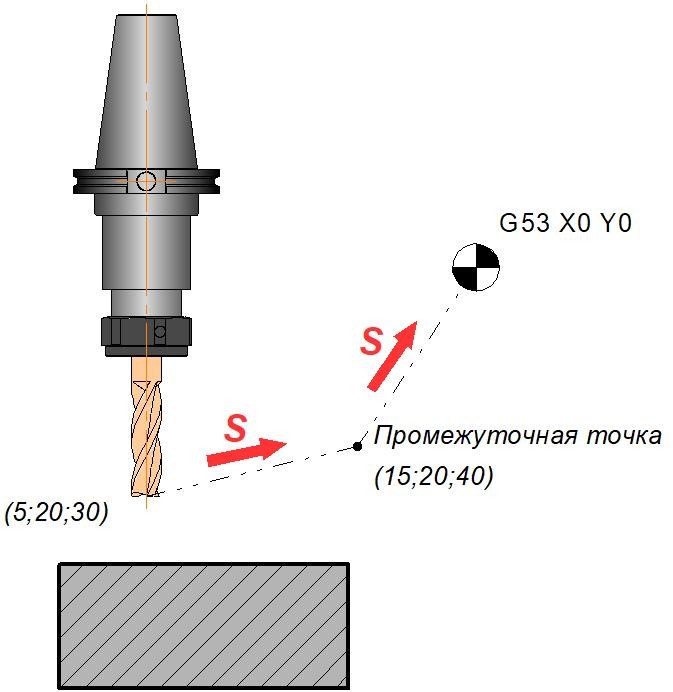
Рис. 6. Использование в УП команды G91 G28 Х10 Y25 перемещает инструмент в промежуточную точку и только потом возвращает его в нуль станка
Опасайтесь указывать в кадре с G28 код абсолютных координат G90. Если в УП находится кадр G90 G28 Х0.0 Y0.0 Z0.0, то очень высока вероятность столкновения режущего инструмента с частями станка или деталью.
G30 – возврат к позиции смены инструмента. При помощи команды G30 осуществляется автоматический возврат оси Z к позиции смены инструмента и отменяется действующая коррекция инструмента. Кадр для выполнения возврата к позиции смены инструмента должен выглядеть так:
G30 G91 Z0
Будьте внимательны: если в кадре вместо G90 находится код G91, то шпиндель будет перемещаться к поверхности рабочего стола.
G31 – функция пропуска с реакцией на внешний сигнал. В некоторых станках можно использовать функцию пропуска с реакцией на внешний сигнал. При помощи этого немодального кода программист программирует линейную интерполяцию аналогично G01, но скомбинированную с возможной реакцией на внешний сигнал. Внешний сигнал подается при нажатии на определенную клавишу панели УЧПУ, например, на клавишу Старт цикла. Если сигнал пропуска не подавать, то программа будет выполняться таким образом, как если бы была запрограммирована команда G01. Если СЧПУ получит внешний сигнал, то выполнение программы переходит сразу же к следующему кадру данных.
G40 – отмена автоматической коррекции радиуса инструмента. Автоматическая коррекция радиуса инструмента отменяется программированием команд G40 и D00. Обычно код G40 находится в кадре с командой прямолинейного холостого перемещения от контура детали.
G1 G40 Х100
Некоторые станки отменяют автоматическую коррекцию радиуса инструмента при нажатии на кнопку аварийного останова или сброса, в случае возврата к нулевой точке станка и с помощью кодов окончания программы. G41 – коррекция на радиус, инструмент слева от детали. Код G41 применяется для включения автоматической коррекции радиуса инструмента, находящегося слева от детали. Направление смещения определяется, если смотреть на траекторию сверху вниз, то есть со стороны «+Z» в направлении «–Z».
G42 – коррекция на радиус, инструмент справа от детали. Код G42 применяется для включения автоматической коррекции радиуса инструмента, находящегося справа от детали. Направление смещения определяется, если смотреть на траекторию сверху вниз, то есть со стороны «+Z» в направлении «–Z».
G43 – компенсация длины инструмента (см. рис. 7) При выполнении УП базовая позиция шпинделя (точка пересечения торца и оси вращения) определяется запрограммированными координатами. Проблема заключается в том, что в базовой позиции шпинделя обработка резанием не осуществляется. Обработка производится кромкой режущего инструмента, которая находится на некотором расстоянии от базовой точки шпинделя.
Для того чтобы в запрограммированную координату приходила именно режущая кромка, а не шпиндель, необходимо «объяснить» СЧПУ, на какую величину по оси Z нужно сместить эту базовую точку. Компенсация длины инструмента осуществляется путем программирования команды G43 и Н слова данных. Обычно компенсация длины активируется совместно с холостым перемещением по оси Z.
Пример: G43 H01 Z100

Рис. 7 Команда G43H смещает базовую точку шпинделя к кромке режущего инструмента
G49 – отмена компенсации длины инструмента. Компенсация длины инструмента отменяется путем программирования команды G49 или Н00.
G50 – выключение режима масштабирования. Код G50 предназначен для выключения режима масштабирования G51.
G51 – включение режима масштабирования. В этом режиме программист изменяет коэффициент масштаба для координатных осей станка. Режим активируется при помощи модального кода G51 и отменяется кодом G50. Можно указать коэффициент масштаба для всех осей одновременно или отдельно для каждой оси. Если коэффициент масштаба более 1, то система координат увеличивается. Если же коэффициент масштаба менее 1, то система координат уменьшается.
Для единого изменения масштаба обычно используется следующий формат:
G51 X_Y_Z_P_
где G51 – включение режима масштабирования; X – координата по оси X для средней точки масштаба; Y – координата по оси Y для средней точки масштаба; Z – координата по оси Z для средней точки масштаба; Р – коэффициент масштаба для всех осей. При независимом изменении масштаба возможно также зеркальное отображение с помощью отрицательных коэффициентов масштаба. Для независимого изменения масштаба обычно используется следующий формат:
G51 X Y Z I J К
где G51 – включение режима масштабирования; X – координата по оси X для средней точки масштаба; Y – координата по оси Y для средней точки масштаба; Z – координата по оси Z для средней точки масштаба; I – коэффициент масштаба для оси X; J – коэффициент масштаба для оси Y; К – коэффициент масштаба для оси Z. В функции зеркального отображения комбинируются между собой независимое изменение масштаба и возможность зеркального отображения запрограммированных координат по одной или нескольким осям. В следующем программном примере поясняется функция зеркального отображения без изменения масштаба (см. рис. 8).
Основная программа:
…
G90 G01 F100
M98 P101
G51 X5 Y5 I-1 J1 K1
M98 P101
G51 X5 Y5 I-1 J-1 K1
M98 P101
G51 X5 Y5 I1 J-1 K1
M98 P101
… Подпрограмма
O0101
G90 X6 Y6
Y7
X7
X8 Y8
X9
Y6
X6
M99
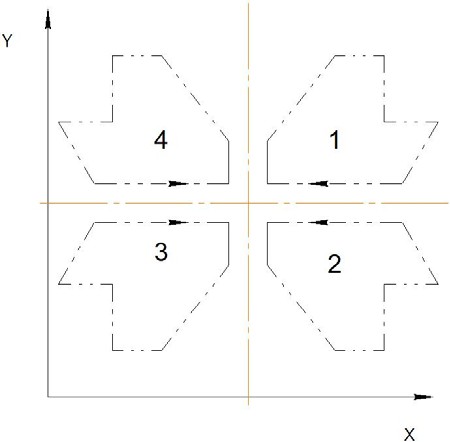
Рис. 8 Зеркальное отображение траектории
G52 – локальная система координат (см. рис. 9). СЧПУ позволяет устанавливать, кроме стандартных рабочих систем координат, еще и локальные системы координат. Код G52 используется для определения подчиненной системы координат в пределах действующей рабочей системы (G54–G59). Когда СЧПУ станка исполняет команду G52, то начало действующей рабочей системы координат смещается на значение, указанное при помощи слов данных X, Y и Z:
G52 X_Y_Z_
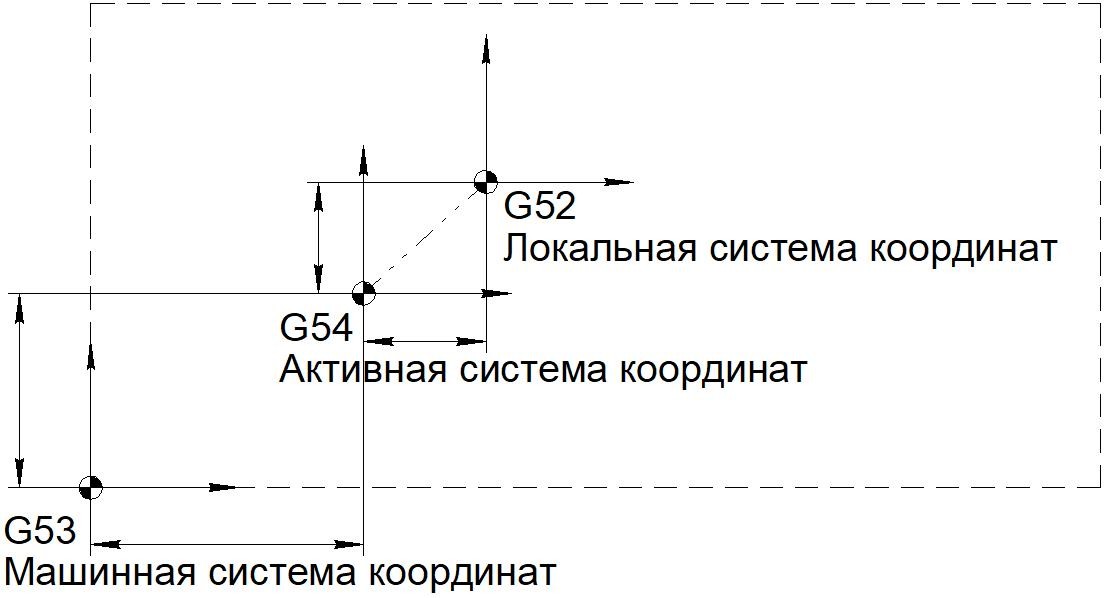
Рис. 9. Три вида системы координат
Команда G52 автоматически отменяется, если программируется другая рабочая система координат G54–G59 или с помощью команды G52 Х0. Y0. Z0.
G54–G59 – стандартные рабочие системы координат. При помощи кодов G54, G55, G56, G57, G58 и G59 определяется, в какой рабочей системе координат будет производиться обработка детали. Подробную информацию об этих кодах и о взаимосвязи рабочей системы координат с системой координат станка вы можете найти в главе 3. Путем выбора различных координатных систем программист может при помощи одной и той же программы обрабатывать различные детали. Если была выбрана одна из координатных систем G54–G59, то она действует до тех пор, пока не будет активирована другая координатная система.
G60 – позиционирование в одном направлении. С помощью этой команды ко всем запрограммированным позициям по каждой оси можно перемещаться из определенного направления («+» или «–»). Благодаря этому появляется возможность исключить ошибки позиционирования, которые могут возникать из-за мертвого хода в системах сервопривода. Чаще всего направление и величина перемещения задаются параметрами СЧПУ.
G61 – режим точного останова. Такая команда предназначена для включения режима точного останова. Функция точного останова подробно описана в характеристике кода G09. Единственная разница между кодами G61 и G09 заключается в том, что G09 является немодальной командой, то есть действует только в определенном кадре. Модальный код G61 остается активным, пока не будет запрограммирована команда на изменение этого режима, например, с помощью кода G63 для включения режима нарезания резьбы метчиком или кода G64 режима резания.
G63 – режим нарезания резьбы метчиком. Режим нарезания резьбы метчиком активируется при помощи кода G63 и используется в циклах нарезания резьбы. В этом режиме невозможна корректировка скорости подачи при помощи специальной рукоятки на панели УЧПУ станка. Режим отменяется программированием команды режима резания G64.
G64 – режим резания. Стандартный режим резания активируется кодом G64. С помощью этого кода отменяются другие специальные режимы – режим нарезания резьбы метчиком и режим точного останова.
G65 – немодальный вызов макропрограммы. Код G65 позволяет выполнить макропрограмму, находящуюся в памяти СЧПУ. Формат для немодального вызова макропрограммы выглядит следующим образом:
G65 P_L_
где G65 – команда для вызова макропрограммы; Р – номер макропрограммы; L – количество выполнений макропрограммы. Если L не указывается, то СЧПУ считает, что L = l.
G66 – модальный вызов макропрограммы. Команда G66 предназначена для вызова макропрограммы, как и команда G65. Единственная разница между двумя этими кодами заключается в том, что G66 является модальным кодом и макропрограмма выполняется при каждом перемещении, пока не будет запрограммирована команда G67. Формат для модального вызова макропрограммы:
G66 P_L_
где G66 – команда для вызова макропрограммы; Р – номер макропрограммы; L – количество выполнений макропрограммы. Если L не указывается, то СЧПУ считает, что L = 1.
G67 – отмена модального вызова макропрограммы. При помощи кода
G67 отменяется режим модального вызова макропрограммы G66.
G68 – вращение координат. Модальная команда G68 позволяет выполнить поворот координатной системы на определенный угол. Для выполнения такого поворота требуется указать плоскость вращения, центр вращения и угол поворота. Плоскость вращения устанавливается при помощи кодов G17 (плоскость XY), G18 (плоскость XZ) и G19 (плоскость YZ). Если желаемая плоскость вращения уже активирована, то программирование команд G17, G18 и G19 в кадре с G68 не требуется.
При действующей команде G90 центр вращения указывается абсолютными координатами относительно нулевой точки станка, если не выбрана одна из стандартных рабочих систем координат. Если выбрана одна из рабочих систем координат G54– G59, то центр вращения устанавливается относительно нулевой точки активной рабочей системы координат. В случае действующей команды G91 центр вращения указывается относительно текущей позиции. Если же координаты центра вращения не будут указаны, то в качестве центра вращения будет принята текущая позиция.
Угол вращения указывается при помощи R-слова данных. Формат для команды вращения координат обычно следующий:
G17 G68 X_Y_R_ 257
G69 – отмена вращения координат. При помощи кода G68 отменяется режим вращения координат.
G73–G89 – постоянные циклы
G73 Высокоскоростной цикл прерывистого сверления
G74 Цикл нарезания левой резьбы
G80 Отмена постоянного цикла
G81 Стандартный цикл сверления
G82 Сверление с выдержкой
G83 Цикл прерывистого сверления
G84 Цикл нарезания резьбы
G85 Стандартный цикл растачивания
О работе с постоянными циклами сверления, растачивания и нарезания резьбы вы можете узнать из главы 8.
G90 – режим абсолютного позиционирования. В режиме абсолютного позиционирования G90 перемещения исполнительных органов производятся относительно нулевой точки станка или относительно нулевой точки рабочей системы координат G54–G59. Код G90 является модальным и отменяется при помощи кода относительного позиционирования G91.
G91 – режим относительного позиционирования. При помощи кода G91 активируется режим относительного (инкрементального) позиционирования. При относительном способе отсчета за нулевое положение каждый раз принимается положение исполнительного органа, которое он занимал перед началом перемещения к следующей опорной точке. Код G91 является модальным и отменяется при помощи кода абсолютного позиционирования G90.
G92 – смещение абсолютной системы координат. Возникают ситуации, когда у оператора станка появляется необходимость установить определенные значения в регистрах абсолютной системы координат для перемещения нулевой точки в новое положение. Дело в том, что не все станки имеют набор из стандартных рабочих систем координат, устанавливаемых с помощью кодов G54–G59. Команда G92 применялась на станках еще до появления функции работы с несколькими стандартными системами координат.
Код G92 используют для сдвига текущего положения нулевой точки путем изменения значений в регистрах рабочих смещений. Когда СЧПУ выполнит команду G92, то значения в регистрах смещений изменятся и станут равными значениям, которые определены X-, Y- и Z-словами данных. Самое главное – учтите, что X-, Y-, Z-слова данных будут показывать текущее положение инструмента в новой координатной системе.
G92X Y Z.
Рассмотрим, как работает команда G92, на конкретном примере. На рисунке 12.10 изображены две заготовки. Заготовка А находится в начальной нулевой точке, которую установил оператор.
Нам необходимо обработать заготовку В, которая расположена на 60 мм правее заготовки А, путем смещения начальной нулевой точки. Сначала переместим инструмент в известную нам начальную нулевую точку, а затем используем G92:
…
G00 X0 Y0
G92 X-60 Y0
…
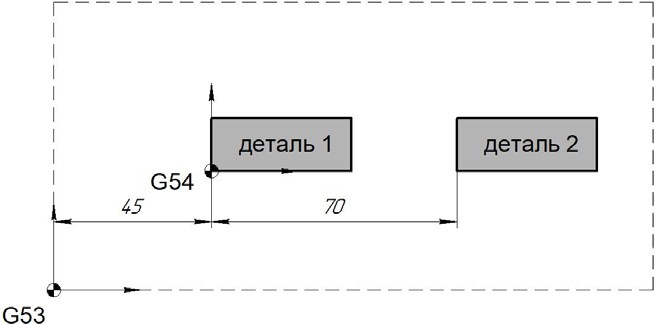
Рис. 10. Код G92 обеспечивает замену регистров действующей позиции станка и смещает нулевую точку станка
Кадр G92 Х-60 Y0 означает, что новое текущее положение инструмента определено координатами (–60; 0), то есть на 60 мм левее требуемой нулевой точки. Таким образом, искомая нулевая точка будет находиться на 60 мм правее текущего положения инструмента. Существует другой метод для достижения этого же результата. Можно сначала переместить инструмент в позицию, которую мы хотим сделать новой нулевой точкой, и затем выполнить команду G92 Х0 Y0.
…
G00 X60 Y0
G92 X0 Y0
…
Команда G92 сама по себе не вызывает осевых перемещений. Указанное при помощи G92 смещение координатной системы на большинстве станков может быть отменено возвратом в нулевую точку или выключением станка.
G94 – скорость подачи в дюймах/миллиметрах в минуту. При помощи данной команды указанная скорость подачи устанавливается в дюймах за одну минуту или в миллиметрах за 1 минуту. Если действует дюймовый режим G20, то скорость подачи F определяется как подача в дюймах за 1 минуту. Если же активен метрический режим G21, то скорость подачи F определяется как подача в миллиметрах за 1 минуту. G20 F10 – скорость подачи 10 дюймов в минуту; G21 F10 – скорость подачи 10 миллиметров в минуту. Модальный код G94 остается активным до тех пор, пока не будет запрограммирован код G95.
G95 – скорость подачи в дюймах/миллиметрах на оборот. При помощи команды G95 указанная скорость подачи устанавливается в дюймах на один оборот шпинделя или в миллиметрах на 1 оборот шпинделя. То есть скорость подачи F синхронизируется со скоростью вращения шпинделя S. При одном и том же значении F скорость подачи будет увеличиваться при увеличении числа оборотов шпинделя. G20 F0.1 – скорость подачи равна 0.1 дюйма на оборот; G21 F0.1 – скорость подачи равна 0.1 миллиметра на оборот. Модальный код G95 остается активным до тех пор, пока не будет запрограммирован код G94.
G98 – возврат к исходной плоскости в цикле. Если постоянный цикл станка работает совместно с кодом G98, то инструмент возвращается к исходной плоскости в конце каждого цикла и между всеми обрабатываемыми отверстиями. Исходная плоскость – это координата по оси Z (уровень), в которой находится инструмент перед вызовом постоянного цикла. Команда G98 отменяется при помощи команды G99.
G99 – возврат к плоскости отвода в цикле. Если цикл сверления работает совместно с кодом G99, то инструмент возвращается к плоскости отвода между всеми обрабатываемыми отверстиями. Плоскость отвода – это координата по оси Z (уровень), с которой начинается сверление на рабочей подаче и в которую возвращается инструмент после того, как он достиг дна обрабатываемого отверстия. Плоскость отвода обычно устанавливается в кадре цикла с помощью R-адреса. Команда G99 отменяется при помощи команды G98.
2. Выдержка и осевое перемещение
X является командой осевого перемещения. Как правило, за X принимают ось, вдоль которой возможно наибольшее перемещение исполнительного органа станка. При этом ось X перпендикулярна к оси Z и параллельна плоскости рабочего стола. Положительное или отрицательное число, входящее в состав этого слова данных, определяет конечную позицию исполнительного органа станка вдоль оси X. В кадре можно запрограммировать X только один раз. Если в одном кадре будет Адреса/слова данных, то СЧПУ будет работать с последней из них (которая ближе к знаку конца кадра).
Пример:
G01 G90 Х100 F200 – линейное перемещение в координату Х = 200 со скоростью 200 мм/мин.
Когда X находится в одном кадре с кодом выдержки G04, то оно определяет время этой выдержки в секундах (паузы).
Пример:
G04 Х5.0 – выполнить выдержку продолжительностью 5 секунд.
Y является командой осевого перемещения. Ось Y перпендикулярна осям X и Z. Положительное или отрицательное число, входящее в состав этого слова данных, определяет конечную позицию исполнительного органа станка вдоль оси Y. В кадре можно запрограммировать Y только один раз. Если в кадре будут указаны несколько команд Y, то СЧПУ будет работать с последней из них (которая ближе к знаку конца кадра).
Пример:
G01 G90 Y102 F200 – линейное перемещение в координату Y = 102 со скоростью 200 мм/мин.
Z является командой осевого перемещения. В качестве положительного направления оси Z принимают вертикальное направление вывода инструмента (например, сверла) из заготовки. То есть ось Z всегда связана со шпинделем станка. Положительное или отрицательное число, входящее в состав этого слова данных, определяет конечную позицию исполнительного органа станка вдоль оси Z. В кадре можно запрограммировать Z только один раз. Если в кадре будут указаны несколько команд Z, то СЧПУ будет работать с последней из них (которая ближе к знаку конца кадра).
Пример:
G01 G90 Z0.5 F200 – линейное перемещение в координату Z = 0.5 со скоростью 200 мм/мин.
А, В, С являются командами кругового перемещения. Под круговым перемещением понимается угловое перемещение (поворот) оси шпинделя фрезерного станка или угловое перемещение (поворот) управляемого поворотного стола (4-я ось).
Круговые перемещения инструмента обозначают латинскими буквами – А (вокруг оси X), В (вокруг оси Y) и С (вокруг оси Z). Положительные направления вращений вокруг этих осей определяются очень просто. Если расположить большой палец по направлению оси, то другие согнутые пальцы покажут положительное направление вращения.
Пример:
G01 G90 С90 F200 – поворот стола на 90° со скоростью 200 мм/мин. Для некоторых СЧПУ адрес С может являться командой на выполнение фаски при действующей линейной интерполяции. Числовое значение, входящее в состав С-слова данных, определяет размер фаски.
I, J, К применяются во время круговой интерполяции и служат для указания относительных расстояний от начальной точки дуги до ее центра. Слово данных с I относится к оси X, слово данных с J – к оси Y, а слово данных с К – к оси Z. При этом в зависимости от расположения дуги значения могут быть положительными или отрицательными.
R при действующей круговой интерполяции (G02/G03) R определяет радиус, который соединяет начальную и конечную точки дуги. Для некоторых СЧПУ адрес R может являться командой на выполнение скругления при действующей линейной интерполяции. Числовое значение, входящее в состав R-слова данных, определяет радиус скругления. В постоянных циклах R определяет положение плоскости отвода. При работе с командой вращения координат R определяет угол поворота координатной системы.
Р обычно используется в постоянных циклах обработки отверстий и определяет время выдержки (паузы) на дне отверстия. Числовое значение, входящее в состав Р-слова данных, обычно определяет время выдержки в 1/1000 секунды. Когда Р появляется в одном кадре с кодом вызова подпрограммы М98, то оно обозначает номер вызываемой подпрограммы. В ряде случаев это же слово данных может указывать на частоту вызова подпрограммы.
Пример:
М98 Р1001 – вызов подпрограммы О1001.
Q часто используется в циклах прерывистого сверления и определяет относительную глубину каждого рабочего хода инструмента. В цикле растачивания Q определяет расстояние сдвига расточного инструмента от стенки обработанного отверстия для обеспечения аккуратного вывода инструмента из отверстия.
При помощи D выбирается значение коррекции на радиус инструмента. Коррекция радиуса инструмента активируется командами G41 и G42. При помощи команды D00 можно отменить действующую коррекцию.
При помощи Н выбирается значение компенсации длины инструмента. Компенсация длины инструмента обычно активируется командой G43. При помощи команды Н00 можно отменить действующую компенсацию длины инструмента.
Для определения скорости подачи служит F-адрес. Если в одном кадре будут запрограммированы несколько скоростей подач, то СЧПУ будет работать с последней из них. В случае программирования F с кодом G94 скорость подачи будет установлена в дюймах (G20) или миллиметрах (G21) в минуту (минутная подача). А в случае использования с G95 скорость подачи будет установлена в дюймах (G20) или миллиметрах (G21), наоборот. F-адрес является модальным, то есть установленная скорость подачи остается неизменной до тех пор, пока не указано новое числовое значение вместе с F или не изменен режим перемещений при помощи G00.
С помощью S определяется число оборотов шпинделя. S-адрес является модальным, то есть установленное число оборотов остается неизменным до тех пор, пока не указано новое числовое значение вместе с S.
При помощи Т осуществляется управление магазином инструментов. Числовое значение с Т определяет номер инструмента (ячейки), который необходимо переместить в позицию смены путем поворота инструментального магазина. Обычно Т программируют в одном кадре с командой смены инструмента М06. В этом случае числовое значение при Т будет определять номер инструмента, который необходимо вызвать из магазина и установить в шпиндель.
Пример:
Т2 М06 – вызвать инструмент № 2.
Как правило, адрес О указывает системе ЧПУ на номер управляющей программы.
Пример:
О2007 – программа обработки будет зарегистрирована в памяти СЧПУ под номером 2007.
С помощью N производится нумерация кадров УП. При использовании номера кадра он может быть поставлен в кадре в любую позицию, но обычно его указывают в самом начале. Номер кадра не влияет на работу станка, а помогает оператору ориентироваться в содержании программы обработки.
3. М-кодирование
М00 – запрограммированный останов. Когда СЧПУ исполняет команду М00, то происходит так называемый запрограммированный останов. Все осевые перемещения останавливаются и возобновляются лишь после того, как оператор станка нажмет клавишу Старт цикла на панели УЧПУ. При этом шпиндель продолжает вращаться (у большинства станков) и другие функции остаются активными. Если оператор станка нажимает клавишу
Старт цикла, то выполнение программы будет продолжено с кадра, следующего за М00.
М01 – останов по выбору. Этот код предназначен для останова по выбору. Действует он аналогично коду М00, однако предоставляет выбор оператору – нужно или не нужно прерывать выполнение управляющей программы. На панели УЧПУ практически любого станка имеется клавиша (или переключатель) М01. Если эта клавиша нажата, то при чтении кадра с М01 происходит останов. Если же клавиша не нажата, то кадр М01 пропускается и выполнение УП не прерывается.
М02 – конец программы. Код М02 информирует СЧПУ о завершении программы.
М03 – прямое вращение шпинделя. При помощи кода М03 включается прямое (по часовой стрелке) вращение шпинделя с запрограммированным числом оборотов (S-слово). Команда М03 остается действующей до тех пор, пока она не будет отменена с помощью М04 или М05.
М04 – обратное вращение шпинделя. При помощи кода М04 включается обратное (против часовой стрелки) вращение шпинделя с запрограммированным числом оборотов (S-слово). Команда М04 остается действующей до тех пор, пока она не будет отменена с помощью М03 или М05.
М05 – останов шпинделя. Команда М05 останавливает вращение шпинделя, но не останавливает осевые перемещения (за исключением режима G95).
М06 – автоматическая смена инструмента. При помощи команды М06 инструмент, закрепленный в шпинделе, меняется на инструмент, находящийся в положении готовности в магазине инструментов.
М07 – включение подачи СОЖ в распыленном виде. Команда М07 включает подачу СОЖ в зону обработки в распыленном виде, если станок обладает такой возможностью.
М08 – включение подачи СОЖ. Команда М08 включает подачу СОЖ в зону обработки в виде струи.
М09 – выключение подачи СОЖ. Команда М09 выключает подачу СОЖ и отменяет команды М07 и М08.
М19 – юстировка шпинделя. При помощи команды M19 осуществляется радиальная юстировка шпинделя (поворот в определенное положение), чтобы выставить приводной носик шпинделя на позицию смены инструмента. В этом положении шпиндель обычно зажимается и его не провернуть рукой.
М20 – отмена юстировки шпинделя. При помощи команды М20 отменяется команда юстировки шпинделя М19.
М30 – конец программы. Код М30 информирует СЧПУ о завершении программы.
М98 – вызов подпрограммы. Команда М98 предназначена для вызова подпрограммы. Вместе с этой командой программируется Р-слово данных, которое обозначает номер вызываемой подпрограммы.
Пример:
М98 Р1001 – вызвать подпрограмму О1001.
М99 – конец подпрограммы. При помощи команды М99 по окончании подпрограммы осуществляется возврат к главной программе, из которой была вызвана подпрограмма.
4. Применение в УП специальных символов
«/» – пропуск кадра полезная функция, позволяющая оператору станка выбрать определенные кадры, которые не нужно выполнять. Эта функция реализуется, если в начало кадра поставить «/» (косая черта, слэш).
Для того чтобы СЧПУ не выполнила кадр, в самом начале которого стоит «/», необходимо, чтобы специальный переключатель Пропуск кадра на панели УЧПУ станка находился в положении Вкл. В этом случае система пропускает данный кадр и переходит к выполнению следующего. Если же переключатель Пропуск кадра на панели УЧПУ станка находится в положении Выкл., то кадр с кодом «/» отрабатывается как обычно. Таким образом, с помощью кода «/» и переключателя Пропуск кадра оператор станка может влиять на выполнение УП.
Пример:
…
N50 G81 X0 Y0 Z-10 R2 F50
N60 X10 Y20
N70 X10 Y30
/N80 X20 Y20
/N90 X20 Y30
N100 M05
…
Положение переключателя Поведение станка Пропуск кадра
Вкл. Кадры с кодом «/» не будут выполнены
Выкл. Кадры с кодом «/» будут выполнены нормально
«;» или «(…)» – комментарии в УП. Комментарии представляют собой обычные предложения, при помощи которых программист доводит до оператора станка определенную технологическую информацию. Как правило, в комментариях содержатся следующие данные:
- дата и время создания УП;
- номер чертежа;
- материал заготовки;
- данные о рабочей системе координат;
- размеры инструмента;
- названия технологических операций.
Для того чтобы ввести комментарии в УП, необходимо использовать специальные символы (знаки) программирования. В качестве таких символов для большинства СЧПУ применяются круглые скобки или точка с запятой. Перед символами комментариев не принято ставить номера кадров, если комментарии занимают кадр полностью.
Просмотров: 515