Руководство пользователя

Телло Эйркрафт
Поиск ключевых слов
Чтобы найти тему, выполните поиск по таким ключевым словам, как «батарея» и «установка». Если вы используете Adobe Acrobat Reader для чтения этого документа, нажмите Ctrl + F в Windows или Command + F в Mac, чтобы начать поиск.
Переход к теме
View полный список тем в оглавлении. Щелкните тему, чтобы перейти к этому разделу.
Печать этого документа
Этот документ поддерживает печать с высоким разрешением.
Использование этого руководства
Прочтите перед первым полетом
Перед использованием TELLOTM прочтите следующие документы:
- Tello Руководство пользователя
- Tello Краткое руководство
- Заявление об отказе от ответственности и правила техники безопасности Tello
Мы рекомендуем вам посмотреть все обучающие видео на официальном сайте RYZE Tech. webсайт https://www.ryzerobotics.com/tello и перед полетом прочтите Заявление об отказе от ответственности и правила безопасности Tello. Подготовьтесь к первому полету на reviewВоспользуйтесь кратким руководством по Tello и обратитесь к этому руководству пользователя Tello для получения более подробной информации.
Загрузите приложение Tello
Найдите «Tello» в App Store или Google Play или отсканируйте QR-код справа, чтобы загрузить последнюю версию приложения. Версия приложения Tello для Android совместима с Android v4.4 и новее. Версия приложения Tello для iOS совместима с iOS 9.0 и новее.

Меры измерения
Этот продукт разработан и испытан с использованием метрических единиц. Для удобства пользователя в этом руководстве также представлены единицы измерения в США. Цифры, указанные в единицах США, являются преобразованием из метрических единиц. В некоторых случаях они являются приблизительными, а иногда округляются, чтобы облегчить пользователям соблюдение правил безопасности. Все цифры, указанные в единицах США, следует использовать только для справки.
Продукт Profile
Введение
Tello — это небольшой квадрокоптер с системой визуального позиционирования и встроенной камерой. Используя систему визуального позиционирования и усовершенствованный полетный контроллер, он может зависать на месте и подходит для полетов в помещении. Расширенные функции, такие как режим Bounce, 8D Flips и EZ Shots, делают использование Tello увлекательным. Tello снимает 5-мегапиксельные фотографии и передает потоковое видео 720p в реальном времени в приложение Tello на мобильном устройстве. Максимальное время полета составляет примерно 13 минут *, а максимальная дальность полета составляет 328 футов (100 м).
Отказоустойчивая защита позволяет Tello безопасно приземлиться, даже если вы потеряете соединение, а его ограждения пропеллера могут быть использованы для повышения безопасности.
Схема самолета

- Винты
- Двигатели
- Индикатор состояния самолета
- камера
- Кнопка Питания
- Антенны
- Система позиционирования Vision
- Летная батарея
- Micro USB-порт
- Защита пропеллера
* Максимальное время полета было проверено в безветренных условиях при постоянной скорости 9 миль / ч (15 км / ч). Это значение следует использовать только для справки.
Самолет
Tello содержит полетный контроллер, систему нисходящего видеосигнала, систему визуального позиционирования, силовую установку и летную батарею. См. Схему самолета в Product Pro.file .
Режимы полета
Tello можно управлять вручную с помощью виртуальных джойстиков в приложении Tello или с помощью совместимого пульта дистанционного управления. Он также имеет различные интеллектуальные режимы полета, которые используются для автоматического выполнения Tello маневров. Кроме того, у Tello есть режим полета, к которому он возвращается при определенных обстоятельствах.
Интеллектуальные режимы полета подробно описаны в отдельном разделе «Интеллектуальные режимы полета». В разделе «Индикатор состояния самолета» описывается, как индикатор состояния самолета указывает, в каком режиме находится самолет.
Управление Tello вручную
Tello имеет две скорости полета, которые вы можете выбрать при ручном управлении самолетом:
- Медленно (по умолчанию): максимальный угол полета составляет 9 °, а максимальная скорость полета — 6.7 миль / ч (10.8 км / ч).
- Быстро: максимальный угол полета составляет 25 °, а максимальная скорость полета — 17.8 миль / ч (28.8 км / ч).
При ручном управлении Tello дрон использует систему визуального позиционирования для автоматической стабилизации. Если условия таковы, что система визуального позиционирования недоступна, дрон автоматически переходит в режим ориентации.
- Чтобы переключиться с медленного на быстрый, вы должны прочитать и согласиться с заявлениями об отказе от ответственности и предупреждениями, которые появляются в приложении Tello. Убедитесь, что вы понимаете разницу между двумя скоростями полета.
- Failsafe Protection автоматически инициирует посадку, если сигнал мобильного устройства слабый или пропадает на 50 секунд, или если приложение Tello дает сбой.
Внимание: В приложении Tello скорость полета выбирается на экране настроек.
Режим отношения
Коптер автоматически переходит в режим ориентации (режим ATTI), когда система визуального позиционирования недоступна. В режиме ориентации дрон не может позиционировать себя, поэтому на него легко влияет окружение. Факторы окружающей среды, такие как ветер, могут привести к горизонтальному смещению, которое может представлять опасность, особенно при полете в ограниченном пространстве. Когда дрон переходит в режим ориентации, как можно скорее приземлитесь в безопасном месте, чтобы избежать опасностей.
Примечание: Индикатор состояния коптера медленно мигает желтым, когда коптер находится в режиме ориентации.
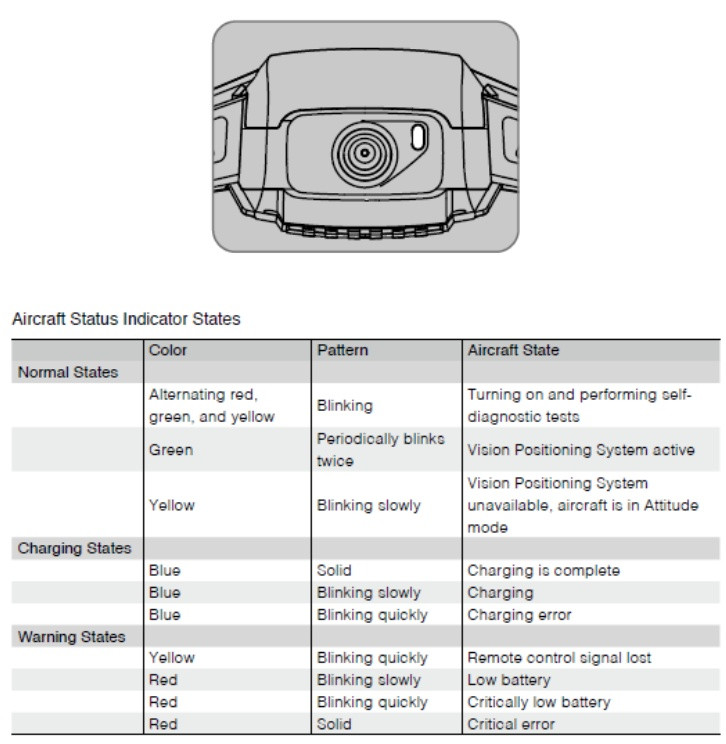
Индикатор состояния самолета
Индикатор состояния самолета Tello сообщает о состоянии системы управления полетом самолета и полетной батареи. Индикатор состояния дрона расположен на носу дрона, рядом с камерой, как показано на рисунке ниже. Обратитесь к таблице ниже для получения дополнительной информации о состояниях самолета, отображаемых индикатором состояния самолета.

Состояния индикатора состояния воздушного судна

Система позиционирования Vision
Система визуального позиционирования помогает коптеру сохранять текущее положение. С помощью системы визуального позиционирования Tello может более точно зависать на месте и летать в помещении или на улице в безветренную погоду. Основными компонентами системы позиционирования Vision являются камера и 3D-инфракрасный модуль, расположенный на днище самолета.

Использование системы визуального позиционирования
Система визуального позиционирования активируется автоматически при включении коптера. Никаких дополнительных действий не требуется. Система визуального позиционирования эффективна только тогда, когда дрон находится на высоте от 1.0 до 32.8 футов (от 0.3 до 10 м) и лучше всего работает на высоте от 1.0 до 19.7 футов (от 0.3 до 6 м). Если коптер находится за пределами этого диапазона, это может повлиять на функцию визуального позиционирования, поэтому требуется особая осторожность.

- На производительность системы визуального позиционирования влияет поверхность, над которой осуществляется полет. Коптер автоматически переходит в режим ориентации, когда система визуального позиционирования недоступна. В режиме ориентации дрон не может позиционировать себя. Управляйте коптером с большой осторожностью в следующих ситуациях, которые могут привести к переходу коптера в режим ориентации:
- Полет на высокой скорости ниже 2 футов (0.5 м).
- Полет над монохромными поверхностями (например, чисто черным, чисто белым, чисто красным, чисто зеленым).
- Полет над сильно отражающими поверхностями.
- Полет над водой или прозрачными поверхностями.
- Полет над движущимися поверхностями или объектами.
- Полеты в местах, где освещение часто или резко меняется.
- Полет над очень темными (<10 люкс) или яркими (> 100,000 XNUMX люкс) поверхностями или над яркими источниками света (например, в направлении солнечного света).
- Полет над поверхностями без четких рисунков или текстуры.
- Полет над поверхностями с одинаковыми повторяющимися узорами или текстурами (например, черепица).
- Полет над мелкими и мелкими объектами (например, ветвями деревьев или линиями электропередач).
- Полет со скоростью более 11 миль / ч (18 км / ч) на высоте 3.5 фута (1 м) или ниже.
- Если система визуального позиционирования коптера выйдет из строя в течение 3 секунд, когда его высота полета превышает 20 футов (6 м), функция Failsafe Protection автоматически инициирует посадку. Если система визуального позиционирования восстанавливается во время посадки, функция отказоустойчивой защиты отключится, и дрон будет зависать.
- Система визуального позиционирования может не распознавать узоры на земле в очень темноте (<100 люкс). НЕ взлетайте, если в приложении Tello есть предупреждение о том, что окружающая среда слишком темная.
- Всегда содержите камеры и датчики в чистоте. Грязь или другой мусор могут отрицательно повлиять на их эффективность.
Интеллектуальные режимы полета

- Убедитесь, что при использовании режима Bounce достаточно места. Обеспечьте радиус не менее 7 футов (2 м) по горизонтали вокруг самолета и оставьте не менее 10 футов (3 м) над ним.
- Перед использованием режима Bounce убедитесь, что индикатор состояния коптера периодически дважды мигает зеленым, указывая на то, что система визуального позиционирования доступна.
- В режиме Bounce убедитесь, что ваша рука вытянута, а ладонь ровная. НЕ ПЫТАЙТЕСЬ поймать самолет. Расстояние между ладонью и коптером должно быть не менее 1 см (30 фут).
- Следите за потенциальными препятствиями в окрестностях (особенно сзади, слева и справа от самолета) и держитесь подальше от них, чтобы избежать несчастных случаев.
Примечание:
- Будьте готовы взять под свой контроль дрон, нажав в приложении Tello, чтобы выйти из режима Bounce в случае возникновения чрезвычайной ситуации.
- Будьте особенно осторожны при полете в темноте (<300 люкс) или при ярком свете (> 10,000 XNUMX люкс).
8D Flips
В 8D Flips дрон автоматически переворачивается в одном из восьми разных направлений.
Использование 8D Flips

важно:
- Убедитесь, что при использовании 8D Flips достаточно места. Обеспечьте радиус не менее 7 футов (2 м) по горизонтали вокруг самолета и оставьте не менее 10 футов (3 м) над ним.
- Перед использованием 8D Flips убедитесь, что индикатор состояния дрона периодически дважды мигает зеленым, указывая на доступность системы визуального позиционирования.
- При использовании 8D Flips расстояние между вами и коптером должно быть не менее 3.5 футов (1 м).
- Следите за потенциальными препятствиями в окрестностях (особенно сзади, слева и справа от самолета) и держитесь подальше от них, чтобы избежать несчастных случаев.
- Будьте готовы взять под контроль самолет, нажав в приложении Tello, чтобы выйти из 8D Flips в случае возникновения чрезвычайной ситуации.
- Будьте особенно осторожны при полете в темноте (<300 люкс) или при ярком свете (> 10,000 XNUMX люкс).
Бросить и пойти
Throw & Go позволяет запустить самолет, осторожно подбросив его в воздух.
Использование Throw & Go

3. Положите дрон на ладонь.
4. Прочтите предупреждение, а затем нажмите, чтобы начать. Пропеллеры начнут медленно вращаться.
Осторожно подбросьте дрон вверх и в горизонтальном направлении от себя, удерживая дрон в горизонтальном положении при его бросании. Пропеллеры начнут вращаться быстрее, и самолет автоматически зависнет на месте. Пропеллеры остановятся, если вы не бросите самолет в течение 5 секунд после того, как пропеллеры начнут медленно вращаться.
Важно:
- Используйте Throw & Go только на открытой местности и убедитесь, что на вашем пути полета нет людей, животных и препятствий.
- Throw & Go нельзя использовать после того, как самолет взлетел.
- Будьте осторожны при использовании Throw & Go и следите за тем, чтобы пальцы не касались пропеллеров, даже если они вращаются медленно.
Держите дрон горизонтально и осторожно подбросьте его вверх и в горизонтальном направлении от себя. ЗАПРЕЩАЕТСЯ бросать дрон со скоростью, превышающей 6 футов / с (2 м / с). ЗАПРЕЩАЕТСЯ бросать дрон под углом к горизонтали более 20 ° и НЕ переворачивать дрон при его бросании. - Перед использованием Throw & Go убедитесь, что индикатор состояния коптера периодически дважды мигает зеленым, указывая на то, что система визуального позиционирования доступна.
- Следите за потенциальными препятствиями в окрестностях (особенно сзади, слева и справа от самолета) и держитесь подальше от них, чтобы избежать несчастных случаев.
- Будьте особенно осторожны при полете в темноте (<300 люкс) или при ярком свете (> 10,000 XNUMX люкс).
EZ выстрелы
Использование 360
В режиме 360 самолет записывает короткое видео, вращаясь на 360 градусов.

Важно:
- При использовании 360 убедитесь, что достаточно места. Оставьте не менее 2 футов (0.5 м) вокруг коптера во всех направлениях.
- Перед использованием 360 убедитесь, что индикатор состояния дрона периодически дважды мигает зеленым, указывая на то, что система визуального позиционирования доступна.
- Следите за потенциальными препятствиями в окрестностях (особенно сзади, слева и справа от самолета) и держитесь подальше от них, чтобы избежать несчастных случаев.
- Будьте готовы взять под управление самолет, нажав ⊗ в приложении Tello для выхода в экстренной ситуации.
- Будьте особенно осторожны при полете в темноте (<300 люкс) или при ярком свете (> 10,000 XNUMX люкс).
Использование круга
В Circle самолет записывает короткое видео во время полета по кругу.

важно:
- Убедитесь, что при использовании Circle достаточно места. Обеспечьте радиус не менее 10 футов (3 м) вокруг точки в 7 футов (2 м) перед носом самолета и не менее 10 футов (3 м) над и под ним.
- Перед использованием Circle убедитесь, что индикатор состояния коптера периодически дважды мигает зеленым, указывая на доступность системы визуального позиционирования.
- Следите за потенциальными препятствиями в окрестностях (особенно сзади, слева и справа от самолета) и держитесь подальше от них, чтобы избежать несчастных случаев.
- Будьте готовы взять под управление самолет, нажав ⊗ в приложении Tello, чтобы выйти из Circle в случае возникновения чрезвычайной ситуации.
- Будьте особенно осторожны при полете в темноте (<300 люкс) или при ярком свете (> 10,000 XNUMX люкс).
Использование Up & Away
В Up & Away самолет записывает короткое видео во время полета вверх и назад.

Важно:
- Убедитесь, что при использовании Up & Away достаточно места. Оставьте по крайней мере 20 футов (6 м) позади и 3.5 фута (1 м) над дроном.
- Перед использованием Up & Away убедитесь, что индикатор состояния коптера периодически дважды мигает зеленым, указывая на доступность системы визуального позиционирования.
- Следите за потенциальными препятствиями в окрестностях (особенно сзади, слева и справа от самолета) и держитесь подальше от них, чтобы избежать несчастных случаев.
- Будьте готовы взять под свой контроль самолет, нажав в приложении Tello, чтобы выйти из Up & Away в случае возникновения чрезвычайной ситуации.
- Будьте особенно осторожны при полете в темноте (<300 люкс) или при ярком свете (> 10,000 XNUMX люкс).
Винты
Tello использует пропеллеры модели 3044P. Есть две разновидности пропеллеров 3044P, которые предназначены для вращения в разных направлениях. Наличие или отсутствие отметок на гребных винтах указывает на их тип и, следовательно, на двигатели, к которым они должны быть прикреплены. Присоединение пропеллеров
Установите маркированные пропеллеры на двигатели с маркированным шасси. Установите пропеллеры без маркировки на двигатели с немаркированным шасси.
При установке убедитесь, что зазор между нижней частью крышки гребного винта и двигателем не больше, чем необходимо для установки инструмента для снятия гребного винта.

Снятие пропеллеров
Вставьте инструмент для снятия гребного винта между крышкой гребного винта и двигателем. Обязательно держите двигатель при снятии гребного винта.

Важно:
- Всегда снимайте гребные винты с помощью инструмента для снятия гребных винтов. ЗАПРЕЩАЕТСЯ снимать пропеллеры вручную, поскольку это может привести к повреждению двигателей и серьезным травмам.
- Во избежание травм стойте на расстоянии и НЕ прикасайтесь к гребным винтам или двигателям, когда они вращаются.
- Используйте только оригинальные гребные винты и НЕ смешивайте типы гребных винтов.
- Перед каждым полетом убедитесь, что пропеллеры и двигатели установлены надежно и правильно.
- Перед каждым полетом убедитесь, что все пропеллеры находятся в хорошем состоянии. НЕ используйте старые, треснувшие или сломанные пропеллеры.
Защита пропеллера
Защита пропеллеров Tello может использоваться для снижения риска причинения вреда или повреждения людям или объектам в результате случайных столкновений с самолетом Tello.
Установка защиты пропеллера
Установите каждую защиту пропеллера на шасси самолета под двигателями. Сдвиньте каждую защиту гребного винта внутрь, чтобы она обернулась вокруг шасси. Убедитесь, что он встал на место со щелчком и что выступающие части шасси надежно вошли в пазы на щитках гребного винта.

Снятие защиты пропеллера
Чтобы снять защиту гребного винта, приложите палец к пальцу, как показано на рисунке ниже. Большим пальцем осторожно приложите скручивающую силу к выступу, выступающему из защиты гребного винта в месте наматывания на шасси.

Важно: ЗАПРЕЩАЕТСЯ прилагать чрезмерные усилия при снятии ограждений воздушного винта, так как это может повредить руки коптера и вы можете получить травму.
Летная батарея
Tello Flight Battery — это аккумулятор емкостью 3.8 В, емкостью 1100 мАч с защитой от зарядки / разрядки.
важно: Перед каждым полетом полностью заряжайте аккумуляторную батарею.
Особенности батареи
- Максимальный ток / повышенное напряжениеtage Защита: аккумулятор перестает заряжаться при чрезмерном токе / напряжении.tage обнаружен.
- Защита от чрезмерной разрядки: разрядка прекращается автоматически, чтобы предотвратить чрезмерную разрядку.
- Защита от короткого замыкания: источник питания отключается автоматически при обнаружении короткого замыкания.
важно: Перед использованием см. Заявление об отказе от ответственности и правила техники безопасности Tello. Пользователи несут полную ответственность за все операции и использование.
Установка летной батареи
Вставьте летную батарею в дрон, как показано. Убедитесь, что аккумулятор установлен надежно.

Чтобы снять аккумулятор, вытащите его из самолета.
Зарядка летной батареи
Чтобы зарядить летную батарею, подключите порт Micro USB на дроне к адаптеру USB (не входит в комплект) с помощью стандартного кабеля Micro USB. Время зарядки: прибл. 1 час 30 минут.

Индикатор состояния коптера медленно мигает синим во время зарядки. Батарея полностью заряжена, когда индикатор состояния коптера горит синим цветом. Отсоедините USB-адаптер, когда аккумулятор полностью заряжен.
важно:
- Всегда используйте сертифицированный FCC / CE (в зависимости от местоположения) USB-адаптер, рассчитанный на 5 В и 1.5 А или выше.
- Перед зарядкой убедитесь, что дрон выключен. Его нельзя заряжать, когда он включен.
- ЗАПРЕЩАЕТСЯ заряжать летную батарею сразу после полета, поскольку ее температура может быть слишком высокой. НЕ заряжайте летную батарею, пока она не остынет примерно до комнатной температуры.
- Заряжайте летную батарею в диапазоне температур от 41 ° до 113 ° F (от 5 ° до 45 ° C). Идеальный диапазон температуры зарядки составляет от 72 ° до 82 ° F (от 22 ° до 28 ° C).
Примечание: Перед тем, как переносить Flight Battery на рейс авиакомпании, он должен быть разряжен до 30% или ниже. Чтобы разрядить летную батарею, управляйте дроном.
Проверка уровня заряда батареи
Нажмите кнопку питания один раз, чтобы включить коптер. Запустите приложение Tello и проверьте уровень заряда батареи в приложении.

камера
Камера Tello позволяет снимать фотографии с разрешением 5 мегапикселей и видео с разрешением 720 пикселей. Функция электронной стабилизации изображения Tello позволяет стабильно получать четкие изображения. Фотографии и видео могут быть viewредактируется в приложении Tello и копируется в папку на мобильном устройстве.
Приложение Tello
Используйте это приложение для управления камерой и другими функциями самолета. Приложение используется для настройки вашего самолета, viewзагрузите свои фотографии и видео, а также скопируйте фотографии и видео в папки на мобильном устройстве.
Подключение к самолету
Включите функцию Wi-Fi на своем мобильном устройстве, а затем выберите сеть TELLO-XXXXXX. Подключение установлено, когда камера в реальном времени view отображается на вашем мобильном устройстве.
камера View



Управление самолетом
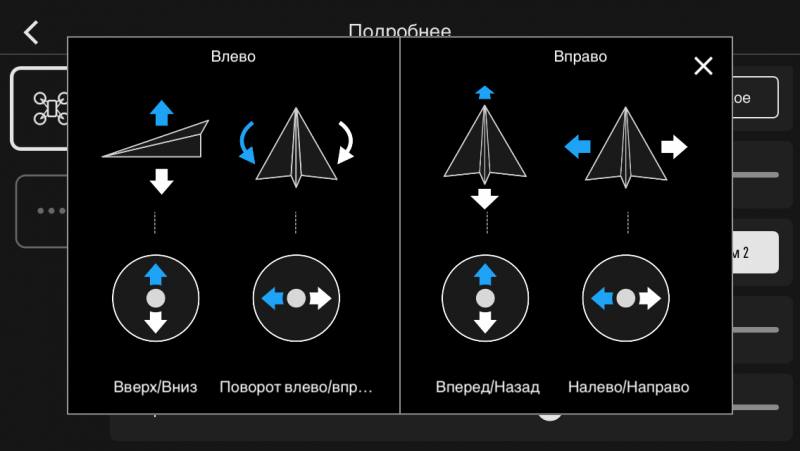
Виртуальные джойстики используются для управления ориентацией коптера (рыскание), движением вперед / назад (тангаж), высотой (газ) и движением влево / вправо (крен). Функция, которую выполняет каждое движение виртуального джойстика, определяется выбором режима виртуального джойстика. Доступны два режима (режим 1 и режим 2). Режим по умолчанию — Mode 2.
В каждом из двух режимов Tello парит на месте с постоянной ориентацией, когда оба виртуальных джойстика центрированы. Перемещение виртуального джойстика из центрального положения выполняет функции, показанные на рисунке ниже.
Режим 1

Режим 2

На рисунке ниже показано, как использовать каждый виртуальный джойстик, используя Режим 2 в качестве примера.ampим.

важно:
- Область за пределами белых кругов также реагирует на команды управления.
- Tello в настоящее время совместим с пультом дистанционного управления Gamesir и сертифицированными пультами дистанционного управления Apple MFi. Виртуальные джойстики отключаются при подключении к пульту дистанционного управления через Bluetooth.
Авиабилет
Убедитесь, что все полеты выполняются в помещении или на открытой местности без ветра. Высота полета ограничена 32.8 футами (10 м), а дальность полета ограничена 328 футами (100 м). Выполните простой пробный полет при первом запуске самолета. См. Раздел «Тестовый полет» ниже.
Требования к условиям полета
- ЗАПРЕЩАЕТСЯ использовать дрон в неблагоприятных погодных условиях, таких как дождь, снег, туман, ветер, смог, град, молния, торнадо или ураганы.
- Летайте только в местах, где вы можете держать дрон на расстоянии не менее 33 футов (10 м) от препятствий, людей, животных, зданий, общественной инфраструктуры, деревьев и водоемов во время полета.
- ЗАПРЕЩАЕТСЯ летать на дроне по маршруту с резким изменением уровня земли (например, изнутри здания на улицу), в противном случае функция позиционирования может быть нарушена, что повлияет на безопасность полета.
- Характеристики самолета и аккумулятора зависят от таких факторов окружающей среды, как плотность и температура воздуха. Будьте очень осторожны при полете на высоте 3,281 фут (1,000 м) над уровнем моря, так как аккумулятор и характеристики самолета могут снизиться.
- ЗАПРЕЩАЕТСЯ использовать самолет вблизи аварий, пожаров, взрывов, наводнений, цунами, лавин, оползней, землетрясений, пыли или песчаных бурь.
- Чтобы избежать помех между вашим интеллектуальным устройством и другим беспроводным оборудованием, выключайте другое беспроводное оборудование во время управления самолетом.
- ЗАПРЕЩАЕТСЯ летать в местах, где могут возникнуть магнитные или радиопомехи, например, рядом с точками доступа Wi-Fi, маршрутизаторами, устройствами Bluetooth, высоким уровнем громкости.tagе линии, высокая громкостьtagСтанции электропередачи, базовые станции мобильной связи или радиовещательные вышки. Полеты в районах, где помехи могут нарушить связь между самолетом и устройством дистанционного управления, могут отрицательно повлиять на ориентацию полета и точность определения местоположения и потенциально могут привести к потере управления. Помехи также могут привести к ошибкам нисходящего канала видео.
Соблюдение правил
Во избежание серьезных травм и повреждения имущества соблюдайте местные законы и правила во время полета. См. Подробности в Заявлении об отказе от ответственности и правилах безопасности Tello.
Тестовый полет
Выполните простой тестовый полет при первом запуске самолета:
- Поместите дрон на ровную поверхность так, чтобы летная батарея была обращена к вам.
- Включите самолет.
- Запустите приложение Tello и войдите в камеру view.
- Используйте автоматический взлет.
- Используйте виртуальные джойстики для управления самолетом.
- Используйте автоматическую посадку.
- Выключите самолет.
Обновления прошивки
Когда вы подключаете дрон к приложению Tello, вы будете уведомлены, если доступно новое обновление прошивки. Чтобы начать обновление, подключите мобильное устройство к Интернету и следуйте инструкциям на экране.
- Обновление прошивки занимает около 5 минут.
- Перед выполнением обновления убедитесь, что летная батарея заряжена не менее чем на 50%.
Характеристики

Послепродажная информация
Посетите https://www.ryzerobotics.com/support, чтобы узнать больше о политике послепродажного обслуживания, услугах по ремонту и поддержке.
Техническая поддержка Ryze
http://www.ryzerobotics.com/support
Авторские права © 2018 Ryze Tech. Все права защищены.
Узнать больше об этом руководстве и скачать PDF:
Руководство пользователя Tello Aircraft — Оптимизированный PDF
Руководство пользователя Tello Aircraft — Исходный PDF
Есть вопросы о вашем руководстве? Размещайте в комментариях!
Всем привет,
Не так давно китайский стартап Ryze Technology, при поддержке таких именитых компаний как DJI (признанный лидер в производстве квадрокоптеров различного уровня) и Intel, выпустил очень интересный квадрокоптер под названием Tello. Предлагаю взглянуть на эту зверушку под катом.
По заявлению производителей, которые хоть и позиционируют его, как квадрик бюджетного уровня доступный всем (а это и правда выглядит так, если взглянуть на цены других квадров от DJI), в нем присутствуют такие серьезные вещи как: 14-ядерный процессор от Intel, система визуального позиционирования, куча сенсоров и гироскопов, а также специально разработанное ПО, оценивающее ситуацию в которой квадрик находится, для обеспечения стабильного и качественного полета. Те же люди заверяют, что летать на нем может любой: хоть ребенок, хоть взрослый, настолько управление интуитивно понятно. Вот тут как раз такой и попался — я ни разу не профессиональный
водитель автобуса
летун, более того, всегда причислял себя к тем, кто «рожденный ползать, летать не может», хотя регулярно совершаю попытки сам же это и опровергнуть (в кладовке валяются Parrot Ar.Drone 2 и 3-4 штуки других летательных аппаратов). Кроме этого, фишкой дрона является возможность его программирования с помощью простого объектного языка Scratch (специально сделан акцент на простоту освоения детьми) и наличие SDK. Забегая вперед скажу, что слово «программирование» в текущей реализации — это слишком громко сказано…
Итак начнем, как обычно, с упаковки.



Внутри:

Комплетация:
— квадрик,
— аккумулятор,
— 4 винта (в дополнение к установленным),
— съемник для винтов,
— бумажка

Характеристики квадрокоптера:
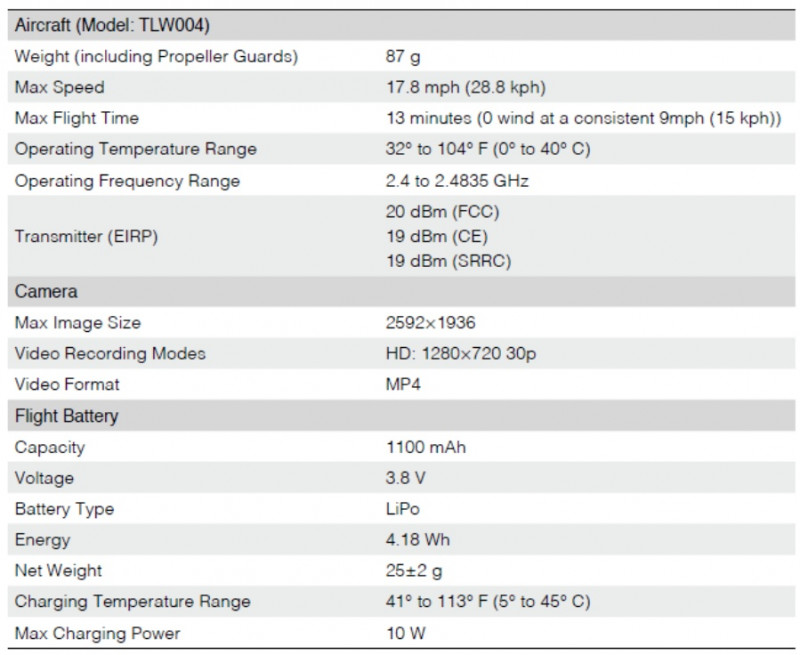
Характеристики полета:
Максимальная дистанция полета:100 метров
Максимальная скорость: 8 м/с (28 км/ч)
Макс. продолжительность полета: 13 минут
Макс. высота полета:10 метров

Вес (без аккума):

Инструкция на Tello в pdf с офф.сайта.
Первое что меня удивило, это его размер — он маленький!



Рассмотрим со всех сторон:

Рама квадрика с кучей ребер жесткости, выполнена из прочного легкого пластика и, как оказалось, она просто неубиваемая.
Винты на Tello не одинаковые и взаимозаменяемы только попарно, по диагонали. На одной паре есть риски на пропеллерах, на другой — нет:


Защита на винтах съемная, выполнена из упругого пластика, но лучше ее не снимать, т, к. движки на этой крохе весьма мощные, я как-то, случайно, коснулся их пальцем во время работы — было больно (на других мелких квадиках, таких острых ощущений никогда при касании не было).
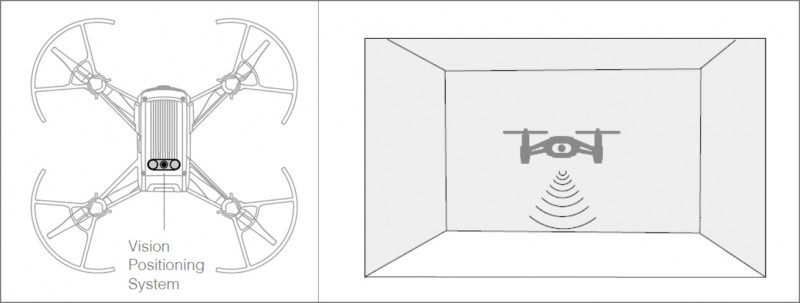
С нижней стороны видны щели обдува (т.к. мощному процессору требуется хорошее охлаждение), датчики и камера системы позиционирования…

… которая называется Vision Positioning System. При работе сквозь линзы заметно красноватое свечение:

На «мордочке» камера HD720P30 и многоцветный светодиод состояния, который светит различными цветами и мигает с разной интенсивностью, в зависимости от состояния квадрика:

Индикация светодиода в зависимости от ситуации:
Снизу резиновые посадочные ножки, в задние встроены антенны:

Аккумулятор LI-Po 1100mAh, напряжение 3.8V:

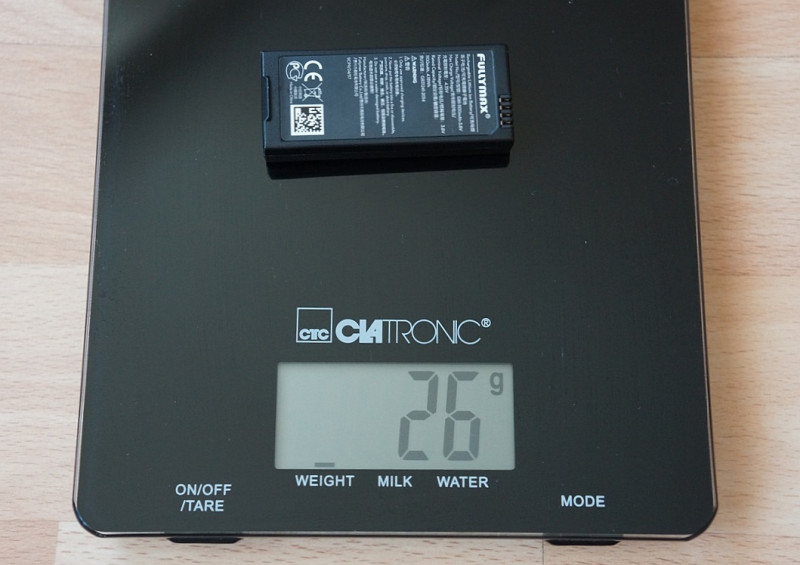

Почти полностью занимает внутренности квадрика 


Заряжается аккумулятор, установленным в квадрик, через его microUSB разъем, установленный на боковой стороне. Включается аппаратец кнопкой на противоположной от разъема стороне:

Заряжаем аккумулятор и взлетаем…
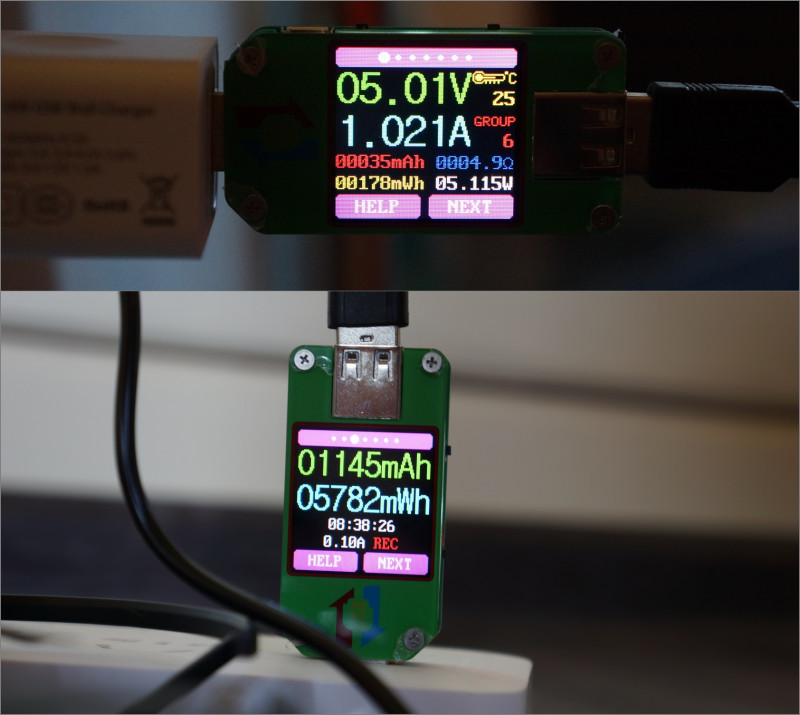
Кстати аккумулятор честный (было бы странно, если бы было по-другому):
Полеты
Управляение квадриком выполняется со смартфона с помощью приложения Tello из Apple store или Play Маркета, еще заявлена поддержка, пока только, контроллера GameSir T1D, но это еще 35-40$.
Включаем квадрик, он поднимает свой WiFi к которому коннектим смартфон и в приложении взлетаем не кнопкой, а проведя пальцем слева на право:
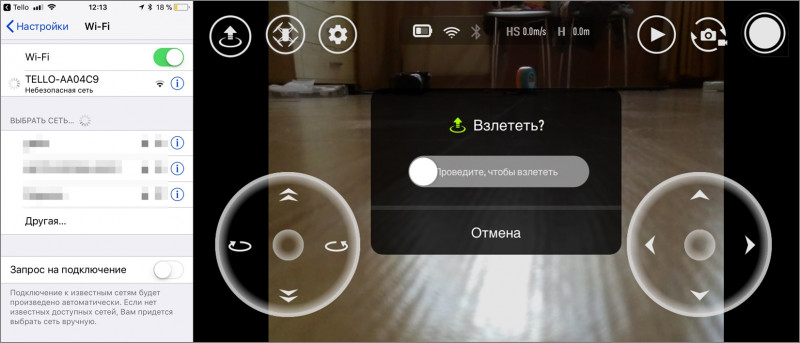
Имея опыт управления квадриками со смартфона, особого восторга я не испытывал, однако, тут оказалось все не так плохо, я бы даже сказал очень неплохо. Я не знаю, что сделали разрабы, он елозя по экрану пальцами, удается очень неплохо управлять летуном. Думаю, в этом очень сильно помогает система Vision Positioning System, она позволяет квадрику позиционировать себя в пространстве, ее задача автоматическая стабилизация квадрокоптера в полете, система, по мере своих возможностей, компенсирует все негативные факторы влияющие на стабильное положение квадрокоптера в пространстве, например, сквозняки в помещении или порывы ветра на улице. За счет этого квадрокоптер, при отсутствии управляющих воздействий со смартфона висит, практически, как влитой на одном месте, не смещаясь и не вращаясь вокруг оси (и триммировать его не нужно).
Система, состоит из отдельной камеры и инфракрасного модуля и начинает работать автоматически, сразу после включения квадрика. Работает система в диапазоне высот от 0.3 до 10м (эффективно с 0.3 до 6м)
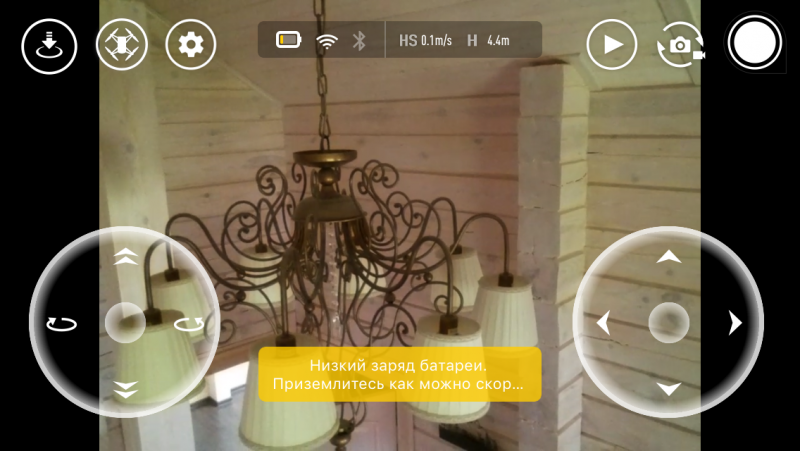
Естественно, система не всемогущая и при, например, слишком сильном ветре, плохом освещении, движении над бликующей поверхностью (водой) или низко на слишком высокой скорости — может отключиться, переводя квадрик в режим Attitude Mode (режим, когда квадрик ведет себя как простой китайский дрон :), о переходе в этот режим он выдает информацию на дисплей смартфона и меняет цвет светодиода статуса (который около камеры) на желтый-мигающий. Если система отключается на высоте выше 6м, инициируется снижение квадрокоптера. Вообще, отмечу, что ПО выдает весьма разнообразный набор сообщений на дисплей, начиная от информировании о низком заряде батареи до сообщений о слабом освещении (плохо для системы позиционирования) или сильном ветре.
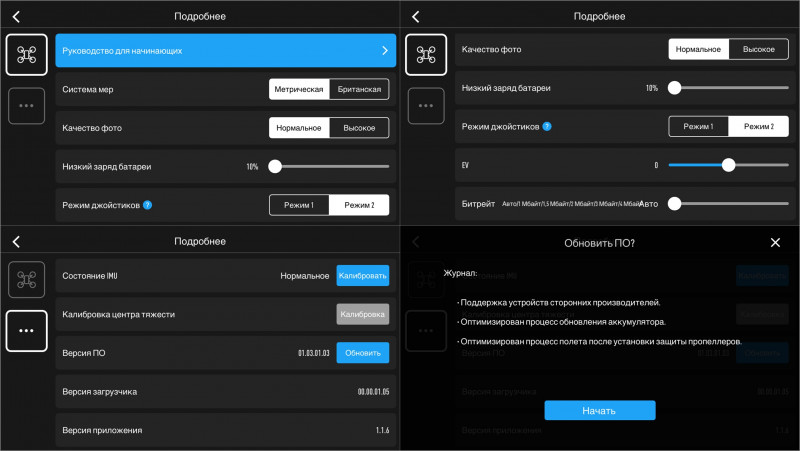
Настроек в приложении не очень много, есть калибровка — но ни разу не потребовалась, даже после жестких падений, квадрик все далает сам. Регулярно выходят обновления ПО:
Управление только виртуальными экранными джойстиками, варианта использования акселерометра (управление квадрокоптером наклоном смартфона) нет. Режима Headless (когда квадрик поворачивает вправо или влево одинаково, независимо от того, как повернут к пользователю), также, нет:
После взлета квадрик зависает на высоте около 1.5 метра и там висит пока мы не начнем им управлять:

Были опасения, что это сугубо домашняя игрушка, но, как оказалось, им гораздо приятнее управлять на улице. Мощности двигателей и возможностей системы контроля, хватает для обеспечения стабильного полета даже при некотором ветре, квадрокоптер, до определенной степени, очень быстро сам компенсирует его давление увеличением тяги на нужном двигателе и своим наклоном. Прикольно наблюдать, как машинка, под весьма ощутимым бризом, висит под наклоном на одном месте:

В случае, если ветер сильный или слабое освещение для корректной работы системы позиционирования, выводится соответствующее сообщение на дисплей смартфона.
Зависший квадрик можно рукой толкнуть или даже «закрутить» (естественно в разумных пределах) и он всеми силами постарается вернуться на тоже место, где висел и развернуться в прежнее положение:


Если к Tello в полете поднести руку снизу, он будет от нее отлетать вверх:
В приложении можно выбрать два режима управления «Slow» и «Fast». Они отличаются, примерно, как обычный и спортивный режимы в автомобиле. В режиме «Slow» квадрик движется плавно, дает меньшие крены, скорость поворта вокруг оси меньше, а радиус разворота больше :), на перемещение виртуальных движков реагирует с некоторой задержкой и «ленцой», то есть это режим для спокойного полета или для обучения. НО все меняется при переключении в режим «Fast», ободки джойстиков на экране смартфона становятся синими, а квадрик «просыпается»…
… реакция на управляющие команды, практически, мгновенная, скорость и доступные крены увеличиваются и начинаешь получать огромное удовольствие от управления. Кроме того, в этом режиме, изменяется реакция дрона: если отпускаешь оба виртуальных джойстика, машинка, как будто, «бьет по тормозам», стараясь моментально остановиться и неподвижно зависнуть. Практически, отсутствует инерция, как в обычных квадриках, когда ты отпускаешь джойстик, а дрон еще метр-два по инерции движется в туже сторону, тут квадрик «притормаживает двигателями». Естественно, в скоростном режиме гораздо лучше летать либо в большом помещении, либо на улице.

В процессе полета на дисплее отображается заряд батареи, уровень WiFi и даже телеметрия в виде скорости и высоты полета (правда высота отсчитывается от начальной высоты взлета, поэтому может быть и отрицательной

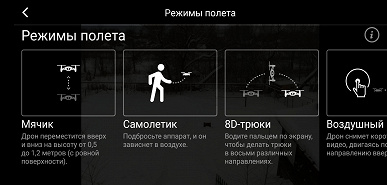
Помимо ручного управления в квадрике есть 6 «автоматических» программ:

1. 8D-трюки.
В этом режиме на дисплее смартфона выделяется квадратная зона, по которой, смахнув пальцем с одного ее конца на другую, квадрик совершает переворот в заданном направлении: вперед-назад, влево-вправо и по любой из диагоналей туда и обратно. Выглядит очень забавно.
2. Самолетик.
Используется при старте квадрика, в этом режиме, держа его на ладони просто подбрасываем его и он не падает, а взлетает.
3. Круг.
Это режим для «себяшечек», встал в центр и дрон тебя снимает, кружась вокруг (режима следования за объектом в движении тут нет).

4. Воздушный…
(«Up&Go»)опять же для селфи, можно направить на себя или на другой объект и он плавно «отплывет» от него назад и вверх.
5. 360°.
Режим съемки панорамы в 360 градусов. Дрон зависает на месте и плавно вращаясь делает видео.
6. Мячик.
«Подпрыгивает» в полете на месте с высоты от 50 до 120см.
Кроме этого, есть режим эффектной посадки на руку, задав его и поднеся руку примерно на 80-50см снизу, квадрик плавно на нее спланирует:
Впечатления от полета
Полеты даже мне, здоровому мужику, именно на данном дроне, доставили большое удовольствие. В общей сложности налетал около 3 часов. Управление со смарта вполне удобное. По-началу, естественно, в помещении, привыкал к рулежке и не слабо побился об стены, но квадрик это прощает, имея действительно прочный корпус и реально сглаживая огрехи управления. В режиме «Fast» очень чувствителен к управляющим командам, можно точно лететь туда куда нужно и под конец уже не боялся летать даже над речкой. При потере ориентации (где перед, где зад), особенно на дальнем расстоянии, можно просто отпустить «виртуальные стики» и квадрик будет висеть на месте не двигаясь с него и поддерживая высоту.

Что касается высоты и дальности полета: программное ограничение высоты 10м, а дальности — 100м. Не каждый смарт по WiFi управлению до этого добивает, но «отпускал» кроху достаточно далеко и высоко, дальше было просто стремно — его уже не видно:

Кроме этого, без проблем можно работать через Сяомишный WiFi свисток-репитер, подключенный к повербанку, усиливая сигнал от квадрика.
Камера и видео
Камера всего 720P, но не самая плохая и, при хорошем освещении, получаются нормальные фотки (2592×1936) и видео (1280×720), можно предполжить, что либо железа на 1080 миниатюрного не нашли, либо в бюджет цены не вписывались с ним.
Со стабилизацией видео все очень средненько. Видео хорошо получается если запускать дрон в автоматическом режиме, типа панорамы или облета по кругу, когда он движется плавно, или, если постараться, плавно летать в режиме «slow», а вот в фаст-режиме, все сильно дергается. В Tello нет никаких носителей информации, куда бы можно было писать видео и фото, все идет по WiFi сразу в смартфон. Кроме этого, судя по всему, в зависимости от качества приема автоматически меняется битрейт, поэтому на высокой скорости, качество видео хуже, да и встроенное ПО, похоже, тоже пытаясь улучшить видео, делает его еще хуже
Дальность уверенной передачи картинки не превышает 10м, даже летая по квартире и залетая в соседнюю комнату, картинки уже нет, однако, канал управления работает гораздо дальше. В общем, видео можно писать с дрона на весьма ограниченной дистанции. Микрофона в квадрике (как и во всех DJI дронах) нет.
ВИДЕО С КАМЕРЫ
исходник
Быстрый полет:
Автоматический режим съемки 360°:
Автоматический режим «Воздушный» (вверх и назад):
Пролет над рекой:
Батарея
Просто порадовала. Первый раз вижу квадрик такого размера и такой отдачей от аккума, с временем непрерывного полета около 15минут (это реальное время полета). Аккум литий-полимерный, заряжается током от 1 до 2А, примерно, за 40минут. Но и цена батарейки не слабая: один аккум стоит около 25$.
Программирование
Ну это громко сказано. Хотя на оффсайте информации по этой теме практически нет, мне даже удалось разобраться что да как, по роликам и инфе с Ютуба. Все не так уж и тривиально. Официально поддерживается простенький объектный язык Scratch, ориентированный на подрастающее поколение для написания простых игр и анимации. К нему можно прикрутить уже готовый модуль SDK от Tello, который позволяет запрограммировать кнопки клавиатуры на перемещение квадрика на заданное расстояние, установку скорости, угла поворота, взлет, посадку, флипы и… в общем-то, всё. То есть просто управляем Tello с компьютера, причем в куцем режиме, нажал кнопку вперед — он передвинулся на 10 см (ну или на 20 — это можно запрограммировать), нажал другую — повернулся, третью — совершил посадку. Я думал, поначалу, что можно, как-то, запрограммировать автоматический полет, оказалось, что фигушки — этого сделать нельзя.
По инструкции, как требовалось, поставил:
— Scratсh,
— Node.js,
— AdobeAIR
— скачал файлы SDK
И, как это ни странно, оно даже заработало:
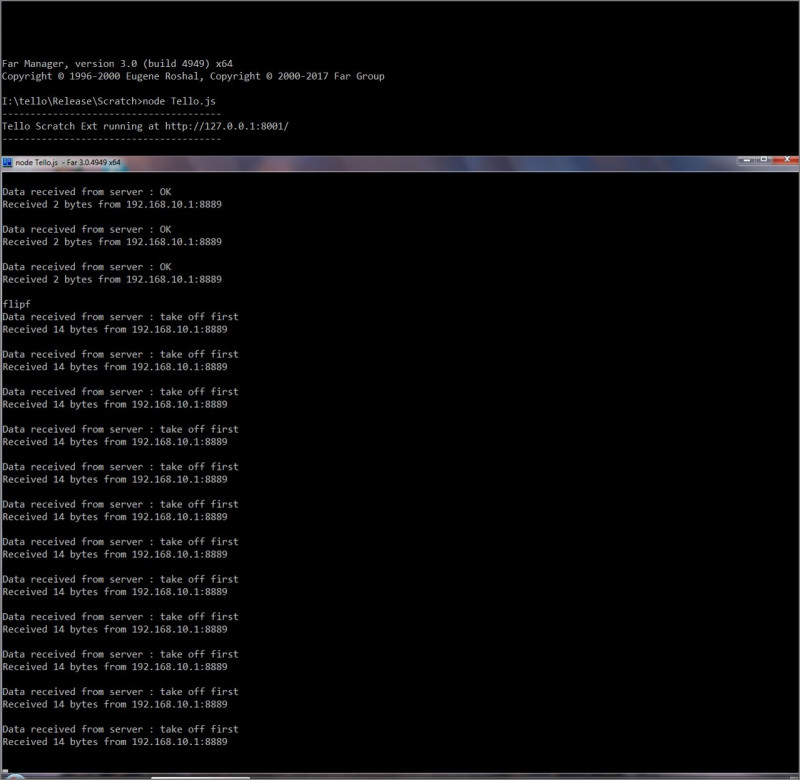
Квадрик приконнектился по WiFi к компу и в Scratch-е появилась возможность написания скрипта для Tello. Выглядит это так:
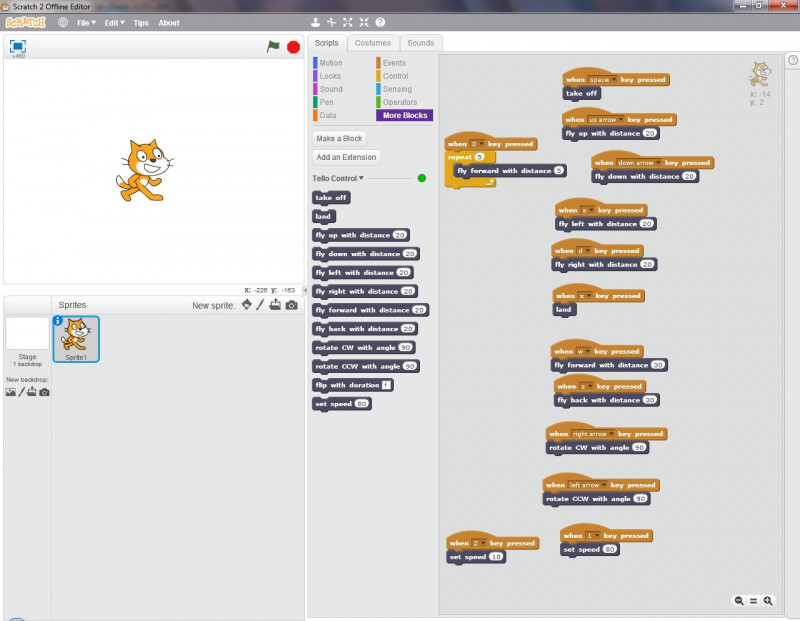
Запускаем скрипт и жмем заданные в нем кнопки на то или иное действие, квадрик выполняет команды — вот и вся потеха. Не интересно и скучно, хотя детям наверное самое оно.
Есть еще программа для IOS и Android под названием DroneBlocks, там функциональных блоков сильно больше, чем в Scratch, под спойлером видео (не мое) программирования и полета:
Программирование Tello программой DroneBlocks
Умельцы на форумах потихоньку начинают «расковыривать» модельку, увеличивая дальность полета и приема фото-видео, что не может не радовать.
Разборки до корки не делал :), но снял нижнюю крышку:

Верхняя «шкурка» тоже снимается (продаются отдельно разных цветов):

За время полетов из потерь: 2 винта, первый сломал по глупости, второй слетел с движка, когда дрон запутался в высокой траве. Комплект винтов тут же заказал, цена около 1.5$ за 4 штуки. Движки стоят, вроде как, вот такие: DJI Tello Motors 8520 Coreless CW CCW, если что, тоже можно свободно купить ~8$ за пару.
Итог
Аппарат суперский. И хоть это первый продукт от RyzeTech, вышел он совсем не комом (хотя, учитывая, кто «родители», было бы странно ожидать другого). Да это игрушка, но, имхо, с задатками старших братьев. Не без недостатков, типа отсутствия стабилизации видео и пульта в комплекте, но уж точно, на голову выше других бюджетных квадриков в той же ценовой категории. Небольшой, прочный, очень качественно изготовленный и отлично управляемый квадрокоптер.
В общем, крайне рекомендую.
ВИДЕО
Игра в «собачку»:
ЕЩЕ ВИДЕО ПОЛЕТОВ
Летаем по комнате:
Open Air (полет в ветреную погоду и над рекой):

Сейчас цена 90$ самая низкая из найденных.
На этом все.
Всем Добра!
Товар для написания обзора предоставлен магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Содержание
- Первый опыт программирования DJI Tello (перевод статьи)
- Приложение Drone Blocks.
- Программирование DJI Tello в приложении Drone Blocks.
- Команды программы Drone Blocks.
- Пробный полет Tello по программе DroneBlocks.
- Обзор квадрокоптера DJI Ryze Tello TLW004
- Оглавление
- Конструкция, технические характеристики
- Квадрокоптер DJI Ryze Tello TLW004
- Джойстик GameSir T1d
- Подключение, настройка
- Эксплуатация
- Ограничения и предупреждения
- Режимы полета
- Камера
- Выводы
Первый опыт программирования DJI Tello (перевод статьи)

В Японии программирование будет являться основным предметом в начальной школе уже к 2020 году. И если ранее для его изучения использовались преимущественно ПК, то сейчас все больше людей начинают использовать планшеты и телефоны для создания программ, тем более что способы программирования могут выглядеть достаточно просто с использованием оболочек блочного типа.
Приложение Drone Blocks.
 Дроны Tello возможно программировать с помощью приложения Drone Blocks. Оно выпущено как для android, так и для iOS смартфонов.
Дроны Tello возможно программировать с помощью приложения Drone Blocks. Оно выпущено как для android, так и для iOS смартфонов.
Загрузка Drone Blocks не вызовет у вас проблем, достаточно вбить в AppStore или Playmarket «Drone Blocks» — и приступить к загрузке.
К сожалению Android версия к моменту выхода этой статьи недоступна (с Апреля 2018 года), так как она находится в тестовом режиме и ограничена 500 загрузками).
Программирование DJI Tello в приложении Drone Blocks.
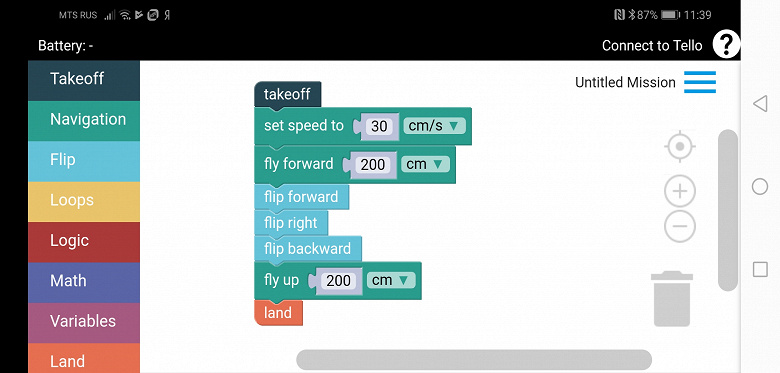
Начнем программировать наш Tello сразу после загрузки приложения. Запускайте Drone Blocks и выбирайте пункт «Connect to Tello»


Непосредственно после подключения Tello к программе вы увидите пример пример готовой программы для управления дроном, эдакий «hello world» для Tello.

Команды программы Drone Blocks.
В левой части расопложены виды команд для Tello, справа непосредственно сама программа с использованием этих команд.
- Take Off — взлет
- Navigation — это основной тип блока, позволяющий перемещать Tello вперед-назад, влево-вправо. Расстояние перемещения можно измерять в дюймах или сантиметрах.
- Flip — позволяет программировать Tello на трюк «флип» — также вперед-назад, влево-вправо
- Loops — позволяет делать циклы в вашей программе, что существенно расширяет возможности программирования Tello
- Logic — команда аналогична оператору IF из многих языков программирования. Предназначена для логических операций (Что если).
- Math — возможность математических вычислений.
- Variables — это переменный, которые можно создавать и использовать для программирования Tello
- Land — команда посадки.
Выглядит все максимально просто и понятно. Перед началом работы в приложении вы можете зарегистрировать аккаунт в программе, что позволит вам сохранять и просматривать созданные ранее программы.
Также в меню вы можете найти пункт «Show Mission Code», позволяющий увидеть исходный код программы.
Пробный полет Tello по программе DroneBlocks.
Источник
Обзор квадрокоптера DJI Ryze Tello TLW004
Оглавление
В нашем недавнем материале, который посвящен выбору мультикоптера, в числе прочих упоминались миниатюрные летающие устройства. Правда, мы прошлись по ним довольно неласково, с этаким презрением назвав их «не более чем игрушкой».
А время идет, и технологии не стоят на месте. Они не только развиваются, но и дешевеют. Функции, которые совсем недавно были присущи лишь дорогим аппаратам, вдруг оказываются успешно внедренными в дешевые приборчики! Обидно, когда видишь недорогое устройство, гораздо более умное и функциональное, чем прибор, втридорога купленный пять лет назад.
Похоже, настал момент снять шляпу и перед миниатюрными квадрокоптерами, признав их «не игрушкой». По крайней мере, перед одной конкретной моделью, которая оказалась у нас на тестировании: DJI Ryze Tello TLW004. Таково полное имя рассматриваемого квадрокоптера, хотя из-за путаницы с перепродажами брендов можно встретить варианты без упоминания торговых марок DJI или Ryze. А то и вовсе без индекса модели. Просто Tello.
Конструкция, технические характеристики

На этом «вводном» фотоснимке рядом с квадрокоптером находится пульт управления (иначе джойстик, контроллер) с установленным на нем смартфоном. Как вы уже поняли, пульт — всего лишь опция. Забегая вперед, отметим: опция крайне необходимая. Хотя, если преследуется цель жесткой экономии, от контроллера можно и отказаться, поскольку управление дроном может осуществляться одним лишь смартфоном. А уж телефон-то у каждого в кармане найдется.
Квадрокоптер DJI Ryze Tello TLW004
Помятая коробка — это вполне нормально для далекого почтового путешествия. С самим дроном вряд ли случится несчастье, поскольку жесткий блистер надежно защищает хрупкую с виду конструкцию от сдавливания.

Комплектность квадрокоптера можно назвать скромной: дрон с установленными винтами, набор запасных винтов с ключом для их монтажа, аккумулятор и краткая инструкция на китайском языке.

Почти невесомая конструкция не имеет никаких подвижных частей, если не считать двигатели с винтами. Четырехлучевая рама из прочного пластика составляет одно целое с корпусом дрона, в котором прячется электронная начинка, включая камеру. Удивительно, как она там вообще помещается, эта электроника. Ведь аккумулятор имеет размеры, почти сравнимые с корпусом, в который он же и вставляется!


Камера, встроенная в переднюю часть корпуса, чуть наклонена вниз. Таким образом, съемка всегда ведется под небольшим углом, и это правильно. Рядом с камерой расположен многоцветный светодиод, сигнализирующий о текущем состоянии дрона: зарядке батареи, рабочем режиме. Задняя часть корпуса является незакрытым слотом для аккумулятора. Батарея просто вщелкивается в этот слот, и ничем, кроме внутреннего фиксатора, не удерживается.
На левом боку дрона находится разъем Micro-USB, необходимый для подзарядки аккумуляторной батареи. Противоположная сторона корпуса содержит единственную кнопку включения/выключения аппарата, срабатывающую от короткого нажатия.


Короткие резиновые ножки предотвращают скольжение коптера на гладких поверхностях, а съемную защиту винтов лучше не демонтировать. Без защиты, конечно, взлетный вес немного уменьшается, зато возникает вероятность скорой замены винтов на запасные.
В нижней части корпуса находится вентиляционная решетка, помогающая охладить электронные компоненты устройства. Сами же компоненты — датчики — расположены ближе к задней части корпуса. Здесь в ряд выстроились высотомер и микрокамера, составляющая основу системы автозависания.


Эта система автоматического удерживания летательного аппарата на одном месте работает на том же принципе, который используется в обычной оптической мышке: камера, направленная вниз, беспрерывно фотографирует поверхность, а программа, обрабатывающая данные, сравнивает поступающие изображения и вычисляет направление перемещения. Подробнее об этой системе мы еще поговорим.

Энергию моторам и электронике дрона дает съемный аккумулятор емкостью 1100 мА·ч.

Полностью заряженная батарея обеспечивает 13 минут полета. Немного, конечно. Впору задуматься о приобретении запасных батарей, а к ним еще и зарядного устройства. Все эти аксессуары нетрудно найти в интернет-магазине, если не боитесь ударов по кошельку.

Пропеллеры закрепляются на осях моторов с помощью маленького комплектного ключа. Эти лопасти настолько малы, что возникает сомнение: они действительно в состоянии поднять летательный аппарат?


Да, в состоянии. Потому что собранный и заряженный квадрокоптер весит всего-то 86 граммов.

Основные технические характеристики квадрокоптера приведены в следующей таблице.
| Квадрокоптер DJI Ryze Tello | |
|---|---|
| Количество двигателей | 4 |
| Связь с мобильным устройством | Wi-Fi 802.11n 2,4 ГГц |
| Датчики | визуальная система автозависания, дальномер, барометр, гиродатчик |
| Интерфейсы | Micro-USB для зарядки батареи |
| Питание | сменная аккумуляторная батарея 1100 мА·ч/3,8 В |
| Дальность полета (связи) | 100 м |
| Максимальная высота полета | 10 м |
| Максимальная скорость | 8 м/с (28,8 км/ч) |
| Максимальное время полета | 13 минут |
| Управление | с помощью мобильного устройства, приложение Tello (iOS 9.0 и выше, Android 4.3 и выше) |
| Размеры, вес | 98×92,5×41 мм, 80 г с пропеллерами и батареей |
| Функции | несколько запрограммированных режимов полета, автоматический взлет/посадка, живая трансляция видео на смартфон, обучающие материалы |
| Камера | |
| Тип | неподвижная, встроенная в корпус дрона |
| Угол обзора | 82,6° |
| Видеосъемка | MP4 (H.264) HD 1280×720 30p, без звука |
| Фотосъемка | JPG, 5 Мп (2592×1936) |
| Стабилизатор | электронный (EIS) неотключаемый |
| Локальный носитель информации | нет, запись фото и видео производится в память мобильного устройства |
Джойстик GameSir T1d
Как уже говорилось, для управления дроном мы использовали джойстик. Эта модель с индексом T1d предназначена исключительно для управления совместимыми квадрокоптерами и не может быть использована ни с какими другими устройствами. Собственно, предназначение контроллера становится понятно даже по картинке, напечатанной на упаковочной коробке. На экране смартфона — не игровой интерфейс, а живая трансляция, поступающая с камеры летательного аппарата.

В комплекте с джойстиком имеется лишь мультиязычная инструкция, где на каждый язык приходится одна-две странички информации. Негусто.

Да и принцип подачи информации тоже слегка хромает. Наверное, страничку с русским переводом открывать все же не стоит.
Пока наш быстрый куренок не убежал, поспешим кратко описать джойстик. Его корпус изготовлен из пластика с мягким тиснением «под кожу». Размеры корпуса подходят как для детских рук, так и для взрослого.


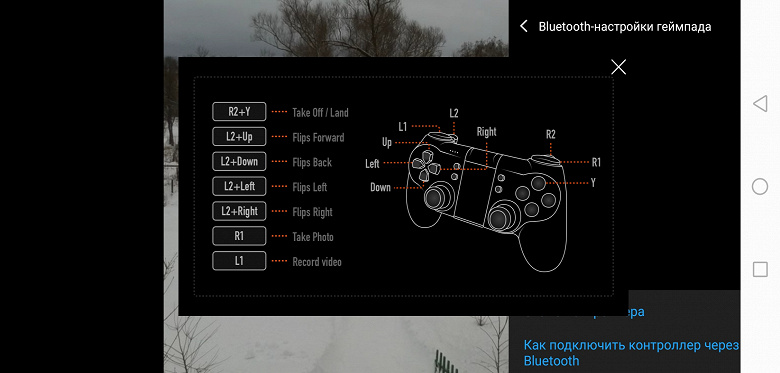
Назначение кнопок, которые задействованы для управления дроном, можно подсмотреть непосредственно в мобильном приложении Tello (до этого мы еще дойдем). Отметим лишь, что для управления дроном используются не все кнопки контроллера.


Откидной подпружиненный фиксатор дает два угла наклона и позволяет закрепить смартфоны с шириной корпуса до 83 мм (этот параметр информативнее, чем неясные дюймы экрана, ведь к контроллеру монтируется не экран смартфона, а корпус, размер которого не всегда зависит от диагонали дисплея).


Зарядка встроенного аккумулятора джойстика производится через порт Micro-USB, полностью заряженной батареи хватит очень надолго. За время тестирования дрона мы не смогли определить даже примерное время автономной работы контроллера — как на нем светились три светодиода, указывающие (по идее) на 75% заряда, так эти же три светодиода горели спустя неделю тестовых полетов.


Основные технические характеристики геймпада приведены в следующей таблице.
| Тип контроллера | Беспроводной Bluetooth-геймпад для управления мультикоптером |
|---|---|
| Управление | 2 мини-джойстика, 17 кнопок (включая 4 кнопки D-pad) |
| Совместимость с ОС |
|
| Связь | Bluetooth (BLE 4.0) до 7 м |
| Питание | Встроенный аккумулятор 600 мА·ч, напряжение зарядки 3,7—5,2 В |
| Рабочий температурный диапазон | от 0 до +40 °C |
| Максимальная ширина корпуса подсоединяемого смартфона | 83 мм |
| Размеры (Ш×В×Г), вес | 160×62×104 мм, 208 г |
Подключение, настройка
Для совместной работы дрона с устройствами управления требуется создать такую цепочку: дрон соединяется со смартфоном через Wi-Fi, а к смартфону через Bluetooth подсоединяется джойстик. Получившаяся связка работает без заметных задержек, команды от джойстика передаются дрону мгновенно и безошибочно. Если, конечно, коптер находится в пределах 100 метров от смартфона при отсутствии препятствий и/или наличия множества сторонних Wi-Fi сетей, которые теоретически могут помешать устойчивой связи.
При включении дрон активирует свой Wi-Fi адаптер, который работает на общепринятой частоте 2,4 ГГц. А ведь на ней могут «сидеть» десятки соседских роутеров и прочих устройств. Характеристики Wi-Fi точки дрона, к которой подсоединяется смартфон, выглядят следующим образом:

Можно видеть, что максимальная доступная скорость передачи составляет 54 Мбит/с. Маловато? Нет, для трансляции видеопотока, битрейт которого в разы меньше, этого вполне достаточно. И уж тем более для передачи телеметрии и команд управления.
Процесс подготовки к полету занимает совсем немного времени. В разы меньше, чем при эксплуатации «взрослых» дронов, которые при включении производят инициализацию многочисленных датчиков, поворотных механизмов своей камеры, отлавливают GPS-сигнал со спутников и занимаются прочей жизненно необходимой высокотехнологичной ерундой. В нашем случае включение дрона занимает считанные секунды, которые уходят на активацию Wi-Fi точки коптера. После нажатия единственной кнопки на боку коптера нужно дождаться, пока его RGB-светодиод не замигает часто-часто оранжевым цветом. Это означает готовность к подключению, пора зайти в настройки смартфона и подключиться к Wi-Fi точке с именем TELLO-D0520F. Пароль для подключения по умолчанию отсутствует, но его можно установить позже (хотя — зачем?).
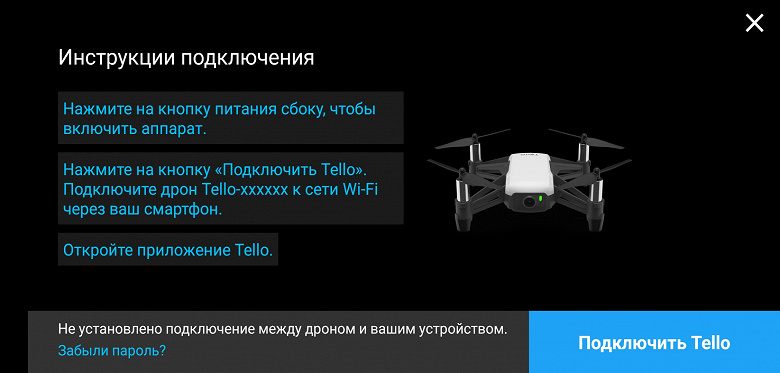
Все эти шаги подробно расписаны в приложении Tello — ошибиться невозможно.
Сразу после установления прямой связи между коптером и смартфоном на дисплее в приложении отобразится живая видеотрансляция с камеры. По умолчанию камера работает в режиме Фото, который дает кадр с соотношением 4:3. Для того, чтобы перевести камеру в «нормальный» видеорежим, следует нажать иконку смены режимов, которая расположена в правом верхнем углу. Вот теперь другое дело.
В программе существует и еще один способ вывода картинки, предназначенный для использования с очками виртуальной реальности. Здесь так же, как и при обычном моноскопическом выводе картинки, соотношение сторон в режимах Фото и Видео разное. Зачем — непонятно.
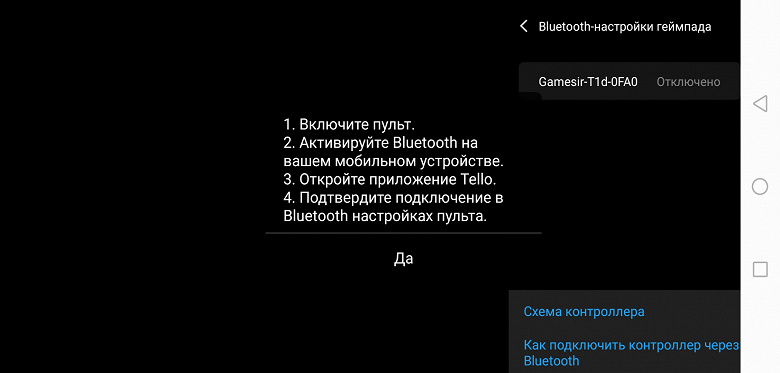
Наконец, последний шаг — подключение джойстика. Это проще простого. Убедившись, что в смартфоне включен адаптер Bluetooth, нужно включить питание джойстика и зайти в настройки приложения Tello. Один из пунктов здесь предназначен как раз для подключения контроллера.
Но, как мы уже говорили, управлять дроном можно и непосредственно со смартфона. Для этого поверх видеоокна расположены виртуальные мини-джойстики, которые пропадают при подключении настоящего контроллера.
Здесь же, в настройках приложения, имеется схема назначения кнопок контроллера. Можно видеть, что для управления дроном действительно используются не все кнопки контроллера. А основные органы управления полетом — два мини-джойстика — вообще никак не отмечены на схеме. Наверное, они считаются само собой разумеющимися.
Ах да, мы же совсем забыли про обновление софта! С этим наверняка столкнется любой вновь испеченный владелец коптера. При первых же попытках соединиться с мобильным устройством пользователь наверняка будет проинформирован о наличии новой версии прошивки летательного аппарата. Да, но как эту прошивку скачать? Ведь соединение смартфона с дроном осуществляется через Wi-Fi точку последнего, а в этой сети нет доступа в интернет. Не страшно, все продумано: прошивка скачивается через любую сеть, которая дает доступ в интернет, а заливка и установка прошивки производится уже по Wi-Fi сети коптера.



Теперь, когда дрон заряжен и прошивка его обновлена, можно приступать к полетам. Хотя, было бы неплохо изучить возможные проблемы, чтобы пореже сталкиваться с ними.
Эксплуатация
Ограничения и предупреждения
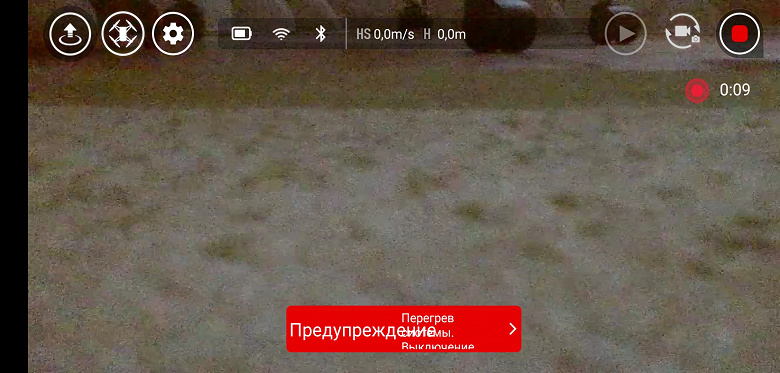
Ввиду миниатюрности рассматриваемого дрона, его электронные компоненты расположены вплотную друг к другу, как в смартфонах. Некоторые датчики (например, тот же датчик камеры) или Wi-Fi адаптер, уж не говоря о процессоре, заметно нагреваются во время активной работы. А значит, пора бояться опасного перегрева. И это действительно так.
Ниже приведен скриншот видеоокна мобильного приложения Tello, где можно видеть тревожное сообщение на красном пожарном фоне. Здесь говорится о перегреве и срочном выключении коптера для охлаждения. До такого перегрева мы довели коптер всего-то за несколько минут тестовой видеосъемки с разными уровнями битрейта, все это время дрон стоял на полу без движения. В результате его электроника нагрелась до опасно высокой температуры.
Чтобы такого не происходило, дрон должен летать. Винты, гоняющие воздух, неплохо охлаждают корпус и электронную начинку коптера. Это можно видеть на тепловизионных снимках дрона, сделанных через три минуты беспрерывного зависания аппарата в воздухе с одновременной видеотрансляцией на смартфон. Это тестирование проводилось в помещении с температурой воздуха около 26 °C.
Можно видеть, что самая горячая область — это нижняя часть корпуса, на которой расположены вентиляционные щели. Она нагревается до 43 °C, в отличие от верхней части с ее 33 °C. И это легко объяснить: крышку обдувает воздух из-под работающих винтов, в то время как дно корпуса ничем не охлаждается. Легко представить, какой нагрев случился бы, не будь здесь вентиляционных прорезей.
Отрицательные температуры тоже не приносят пользы дрону и пилоту: аккумулятор коптера имеет малую емкость, которая на морозе падает в разы. Если промедлить минуту-другую, оставив коптер на снегу, то подключаться будет уже не к чему: дрон сообщит, что батарея пуста. Если у него вообще хватит энергии, чтобы сообщить об этом. Именно так произошло и с автором: пока он устанавливал камеру на штатив и настраивал ее, включенный дрон ожидал взлета, стоя на снегу. Когда все было готово к съемке, оказалось, что за прошедшие полторы-две минуты аккумулятор коптера разрядился почти в ноль.
Вывод: в зимний период батарею надо прятать глубоко под слоями зимней одежды, а доставать ее непосредственно перед взлетом. Если на морозе коптер успеет взлететь — дальше можно не беспокоиться, батарея уже не замерзнет, поскольку из-за активного разряда будет подогревать сама себя. К тому же, расположенная вплотную с ним электроника тоже добавляет чуточку цельсиев.
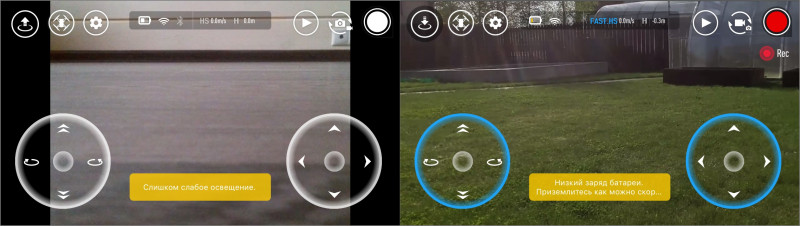
Следующий тип опасности, которая грозит коптеру неприятностями вплоть до аварии, касаются его системы позиционирования. Мы уже говорили, что эта система состоит из микрокамеры, направленной строго вниз, и программы, которая анализирует поступающие кадры на предмет сдвига поверхности. Точно так, как это делают все оптические мышки. При малейшем замеченном сдвиге (в любом помещении всегда присутствует движение воздушных масс, не говоря уже об улице) электроника дает команду моторам, которые, изменяя скорость вращения винтов, возвращают дрон на прежнее место. Отличие технологий заключается в том, что в мышке фотографируемая поверхность (стол, коврик) подсвечивается светодиодом. Здесь же никакого светодиода нет, да и толку от него будет немного, если дрон поднимется повыше. Поэтому дрону требуется хорошо освещенная с контрастным рисунком поверхность, относительно которой он определяет свое положение в горизонтальной плоскости. Таким образом, при полетах в вечернее и ночное время, а также при полетах над снегом или водой автоматическое зависание не будет работать, поскольку камера либо не видит поверхности, либо ошибается при сравнении снимков из-за слишком высокой их яркости, движущихся бликов и т. д. Собственно, в этом мы убедились практически сразу после первой же попытки зависнуть над свежевыпавшим снегом.
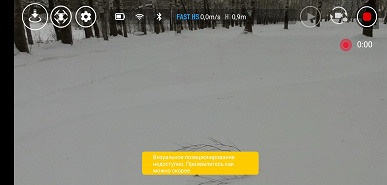

Такая потеря ориентации чаще всего оканчивалась аварией (к счастью, не катастрофой): дрон, потеряв под собой землю, показывал пилоту желтую карточку с грозным текстом и пускался в дрейф с одновременным неспешным снижением, при этом на команды с джойстика он реагировал крайне неохотно. Точнее, так: дрон, не видя точки отсчета, переставал сопротивляться слабенькому ветру, который начинал потихоньку сдвигать его в сторону. Экстренные попытки вернуть коптер на место, изменить направление его медленного сноса оказывались малоуспешными: двигатели не включались в полную силу, будто коптер не в состоянии сопротивляться ветру. На самом-то деле, очень даже в состоянии. Но лишь тогда, когда его система позиционирования «видит» землю.
И даже хорошо, что на пути неконтролируемого дрейфа коптера обязательно оказывалась береза или куст. Никакого ущерба коптеру эти столкновения не наносили — слишком он легкий. А при падении дрона его двигатели просто отключаются.

После нескольких падений стало понятно, что в случаях потери дроном ориентации следовало включать экстренную посадку, а не пытаться задействовать моторы. Ведь в любом случае — что после экстренной посадки, что после падения — пришлось бы лезть за дроном в сугроб.
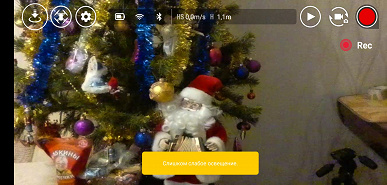
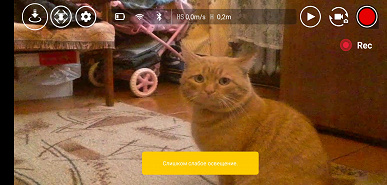
Аналогичная проблема появляется и при нехватке освещенности. Характерно, что эту нехватку система позиционирования дрона ощущает даже в комнате, которая неплохо, казалось бы, освещена.
Таким образом, вечерне-ночные полеты нашему дрону противопоказаны так же, как полеты над снегом и водной гладью. Пользуясь случаем, мы решили провести несложный эксперимент: поверхность, над которой завис коптер, заставили перемещаться. Результат оказался вполне предсказуем: дрон послушно двинулся вслед за приманкой. Но стоило чуть увеличить скорость перемещения поверхности под дроном — оптическая система позиционирования не успела обработать это движение и дрон потерялся. Правда, благодаря вовремя появившемуся низкому солнышку снег был освещен достаточно контрастно, и коптер не пустился в самовольный дрейф.
Еще один тип тревожных оповещений формируется гиродатчиком коптера, который определяет угол наклона корпуса: соответствующее предупреждение появляется на дисплее, когда угол наклона превышает 35°. Трудно сказать, с какой целью выводится это предупреждение и как на него должен реагировать пилот. Ведь в обычных условиях дрон просто не допустит подобного наклона, а если случилась авария и дрон перевернулся — тут уже при всем желании ничего не сделаешь.

Полностью заряженной батареи коптеру хватает на 10-13 минут полета в зависимости от полетной активности. Зато подзарядка аккумулятора от состояния «почти пусто» до 100% занимает не более получаса.
О звуке, который издает работающий коптер, можно сказать так: большой комар. Даже кот, который панически боится пылесоса, электробритвы и других работающих приборов, совсем не испугался дрона. Напротив, он с интересом следил за жужжащим прибором и следовал за ним из комнаты в комнату, стараясь не упустить из виду.

Режимы полета
Беспроводное управление, а тем более управление по Wi-Fi, да еще и с одновременной трансляцией видеосигнала, почти всегда предполагает некоторую задержку. Однако в рассматриваемом коптере никакого лага не наблюдается, команды с пульта мгновенно передаются дрону и тут же исполняются. Если быть внимательным и помнить об инерции, то столкновений нетрудно избежать. Хотя, как мы уже говорили, дрону падения не страшны.
Передвигаться дрон умеет не только по командам пилота. В нем присутствует несколько «вшитых» режимов-трюков, выполнить которые вручную довольно трудно, а то и вовсе невозможно. Например, кувырок ни за что не осуществишь вручную. А вот активировав такую команду — пожалуйста.

При выборе одного из шести трюковых режимов на дисплей выводятся соответствующие инструменты. Например, кувырки (они тут называются 8D-трюки) осуществляются свайпом по дисплею смартфона в предназначенной для этого зоне, при этом программа отрисовывает траекторию движения пальца. Подумав полсекунды, дрон послушно кувырнется в указанном направлении. Делает он это быстро и аккуратно, почти не изменяя высоты зависания. Поэтому такой трюк можно без опаски применить и в помещении. Помимо кульбитов, дрон умеет скакать вниз-вверх словно мячик, взлетать с руки, садиться на руку, совершать облеты и повороты вокруг оси на 360°.
Имеется и совсем удивительная возможность самостоятельно, без знания даже основ программирования, создать собственный алгоритм полета. Это делается в мобильном приложении DroneBlocks, где простым перетаскиванием команд-блоков задается программа движений. Из этого же приложения дается команда на выполнение созданной последовательности действий.
Но толку от всех этих выкрутасов было бы немного, если бы в коптере не имелась камера. Ведь дрон даже рекламируется в качестве летающего сэлфи-мейкера. Насколько оправдано такое позиционирование коптера? Сейчас узнаем.
Камера
Камера, которой оснащен дрон, характеризуется как очень и очень скромная по своим возможностям. Сравнить ее можно, пожалуй, с камерами мобильных телефонов 10-15-летней «свежести». Похоже, что оптико-электронная начинка взята именно с тех времен: мелкая «слепая» матрица, дающая значительный уровень роллинг-шаттера, невысокое качество кодирования потока, мелкий размер кадра и низкая частота. Фотографические способности камеры выглядят чуть получше, но и здесь чувствуется некоторый апскейлинг, принудительное увеличение размера кадра ради только лишь размера, но не детализации.
Хотя, если хорошенько взвесить (причем буквально), то и такое качество покажется неплохим: коптер недорог, шустрый, а к тому же и безопасный ввиду исключительно малого веса. Да еще и снимать умеет вместе с одновременной трансляцией — ну не чудо ли?
Уточним: на самом деле камера дрона не ведет запись самостоятельно. Видеопоток с размером кадра 1280×720, частотой 30 кадров в секунду и максимальным битрейтом 4 Мбит/с, а также и фотоснимки, записываются самим мобильным приложением в память смартфона. В маленьком квадрике просто не нашлось места для еще одного электронного блока, слота карты памяти. Кстати, этим объясняется невысокое качество видеосъемки, но при этом относительно неплохие фотоснимки: видеопоток достаточного размера и качества трудно «протолкнуть» по Wi-Fi, а вот с отдельным снимком это осуществить проще. Также из-за того, что запись ведется смартфоном, в видео иногда появляются рывки, срывы и замирания трансляции.
Начнем с разрешающей способности. Она напоминает таковую в недорогих вебкамерах, с натяжкой достигая 500 ТВ-линий по горизонтальной стороне кадра. Да, панорамные виды такой камеркой снимать бесполезно, а вот для какого-нибудь инстаграмма — вполне сносная детализация.

Второй недостаток касается стабилизации и роллинг-шаттера. Стабилизации в камере дрона практически нет, хотя заявляется наличие EIS (то есть, электронного программного). Не знаем, не знаем. Она, может, и есть, да вот только не работает. А из-за постоянной небольшой болтанки при зависании на улице, кадр, мягко говоря, пляшет.
Роллинг-шаттер здесь хоть и имеется, но выражен несильно. По крайней мере, до уровня роллинг-шаттера в вебкамерах тут далеко. Но небольшие волнообразные искажения заметить несложно. Они вызываются вибрацией корпуса от работающих моторов, ну и, конечно, той самой болтанкой.
Камера, жестко вмонтированная в корпус, чуть наклонена вниз, благодаря этому при съемке из неподвижного положения захватывается как линия горизонта, так и находящееся снизу-спереди. Однако серьезный минус такой статичной конструкции камеры очевиден: дрону, как и обычному вертолету, для изменения направления полета, набора скорости и торможения нужно наклониться всем корпусом. А значит, камера тоже наклонится. В результате быстрых перемещений съемка оказывается бракованной — объект очень трудно удержать в кадре. Особенно, если снимаемый объект движется. К тому же, коптер ввиду своей миниатюрности производит все движения слишком резко, дергано. За малейшим отклонением джойстика следует немедленная и очень быстрая реакция: моторы изменяют скорость вращения, в результате чего кадр оказывается испорчен.
Таким образом, удачной съемки видео- или фотоселфи в движении, скорее всего, не получится. Вот зависнув неподвижно, выбрав ракурс — это другое дело.
О невысокой чувствительности камеры дрона все уже, наверное, догадались. Съемка в помещении, которое освещено лампами, дает заметный шум в кадре, а баланс белого склонен ошибаться. Да, экспозицию (точнее, яркость кадра) можно отрегулировать в пределах от −3 до +3. Но работает эта регулировка как-то невнятно, поэтому съемку лучше вести с исходным нулевым значением EV.
Вернемся к значительной разнице в качестве между видео и фото: ее можно оценить хотя бы с помощью этих стоп-кадров и снимков:
Немного грустная глава получилась. И короткая. Хотя, все это вполне объяснимо: такой недорогой дрон — это в первую очередь летающая игрушка, безопасная и достаточно «умная». А камеру в ней правильней считать просто бонусом, бесплатной опцией.
Выводы
После этого краткого знакомства с летающим аппаратом перечислить очевидные минусы и плюсы конструкции проще простого. Из положительных отличительных черт дрона следует отметить:
- безопасность
- неплохая автономность
- быстрая подзарядка сменного аккумулятора
- наличие камеры
- наличие запрограммированных режимов полетов и возможность создания пользовательских
- возможность подключения контроллера и VR-очков
Минусов тоже оказывается немало:
- неустойчивость над многими поверхностями и при недостатке освещенности
- неустойчивость при эксплуатации вне помещений даже при небольшом ветерке
- слабые видеовозможности камеры, нестабильная передача видеопотока на смартфон
- запись видео и фото в память смартфона, а не на карту памяти дрона
- небольшой радиус действия связи между дроном и смартфоном
Хоть это и игрушка, но все же не совсем игрушка. Да, в качестве оригинального подарка ребенку коптер подойдет идеально. Но и взрослому человеку будет интересно самому «порулить» пусть крошечным, но все же летательным аппаратом. По крайней мере, основные атрибуты, присущие летательным аппаратам, у дрона имеются.
Источник