Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» — разминает клешню. А как же иначе? Зарядку нужно делать всем!
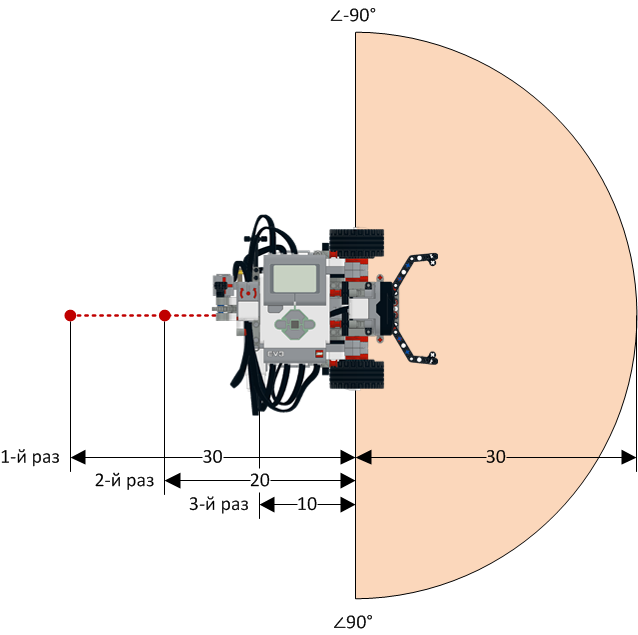
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:
Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Файлы:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Ещё один способ управления роботом с клешней показан на этом видео:
Здесь управление роботом сделано от первого лица с помощью смартфона, планшета и приложения RoboCam. Как установить и использовать это приложение читайте в следующих статьях. Скачать готовые настройки RoboCam для управления роботом с клешнёй можете здесь.

ClawBot — этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место. Для сборки необходим набор 45544.
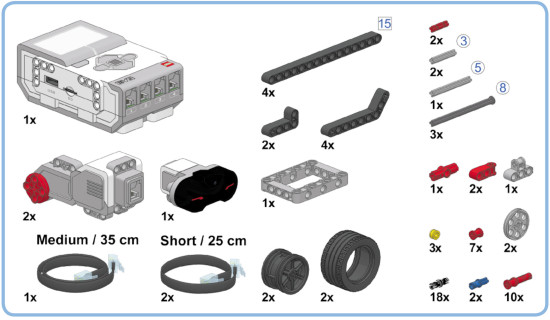
Комплектация
- большие моторы — 2 шт.
- средний мотор — 1 шт.
- МПК — 1 шт.
- датчик расстояния ультразвуковой- 1 шт.
- датчик касания — 1 шт.
- гироскоп — 1шт.
Скачать инструкцию по сборке данного робота можно ниже


Перейти к содержанию
В этой статье — инструкция по сборке достаточно распространенного варианта захвата Lego EV3 на червячной передаче. Захват надежно удерживает предметы и не раскручивается после остановки мотора. Подойдет для занятий по робототехнике или соревнований. Переходите по ссылке «Скачать инструкцию» ниже в описании.
Фото:



Оборудование: базовый набор Lego Mindstorms Education EV3.
Модель: ЗСМ2-Ч-В1 — захват на среднем моторе двухпальцевый червячный, вариант 1.
Механизмы: червячная передача, рычаг.
Особенности. Крутящий момент (сила) увеличивается за счет понижающей червячной передачи. Передаточное отношение — 24:1, т.е. 24 оборота на входе и 1 на выходе.
Силы захвата достаточно, чтобы поднять кубик без использования резинок (смотрите фото).
Недостатки:
— перекручивание червяка может привести к слишком сильному сжатию предмета и его повреждению или поломке пластиковых деталей.
Задачи:
- Собери захват, используя инструкцию.
- Соедини захват с робоплатформой или установи на манипулятор. Подключи средний мотор к блоку EV3.
- Доработай конструкцию захвата в зависимости от решаемой задачи.
- Выполни предложенные задачи по переносу или сортировке предметов.
( 1 оценка, среднее 5 из 5 )
Introduction: Simplest EV3 Robot Claw/Gripper
About: My name’s William and I love robots and everything regarding automation. I also enjoy music, drawing and debating.
More About W1ll14m »
Hi there!
Wanna build a reliable and simple Robot Claw/Gripper? Wanna build it as quickly as possible?
Then you’ve come to the right place!
Step 1: Watch the Video
Step 2: You’ll Need:
Step 3: You’ll Also Need (I Forgot These on the Previous Image)
Step 4:
Step 5:
Step 6:
Step 7:
Step 8:
Step 9:
Step 10:
Step 11:
Step 12:
Step 13:
Step 14:
Step 15:
Step 16: Enjoy!

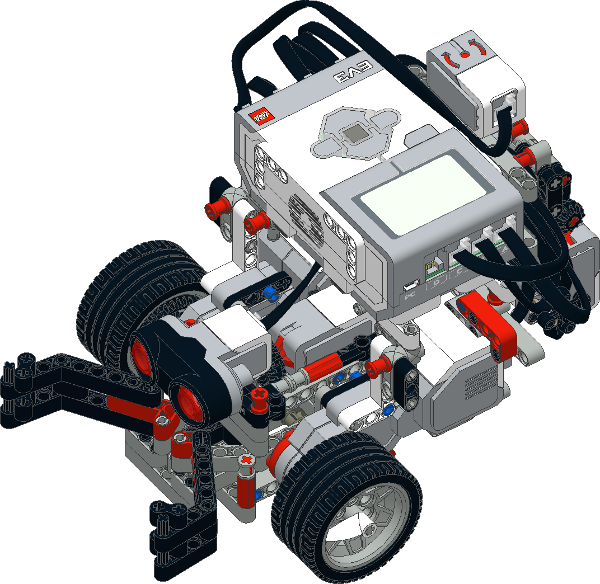
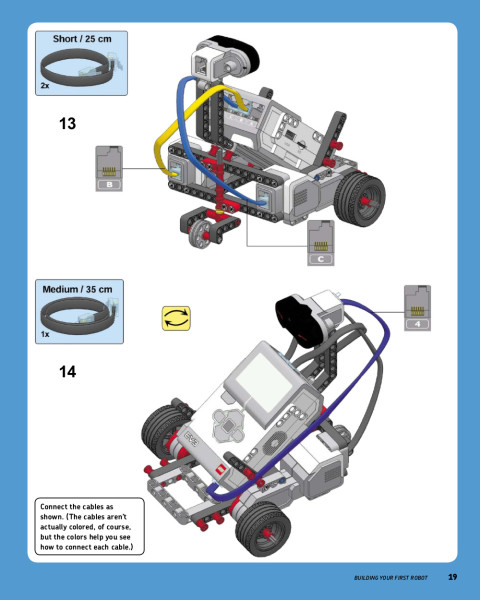
The EXPLOR3R is the first robot in The LEGO MINDSTORMS EV3 Discovery Book. It’s a versatile wheeled vehicle that uses sensors to navigate around a room and follow lines.
Chapters 1-9 in the book use this vehicle to demonstrate the ins and outs of LEGO MINDSTORMS EV3 programming. The examples in the book show you how to make the EXPLOR3R avoid obstacles, track the IR beacon, and follow colored lines (and much more!)
Since it’s easy to build and easy to extend the design, EXPLOR3R is also a useful prototyping platform for other projects. This video shows the EXPLOR3R running Python code, and this camera sensor even extends EXPLOR3R with vision. And now you can build it too.
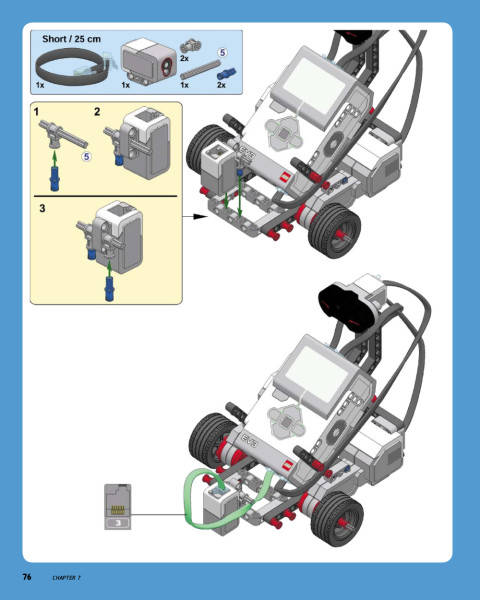
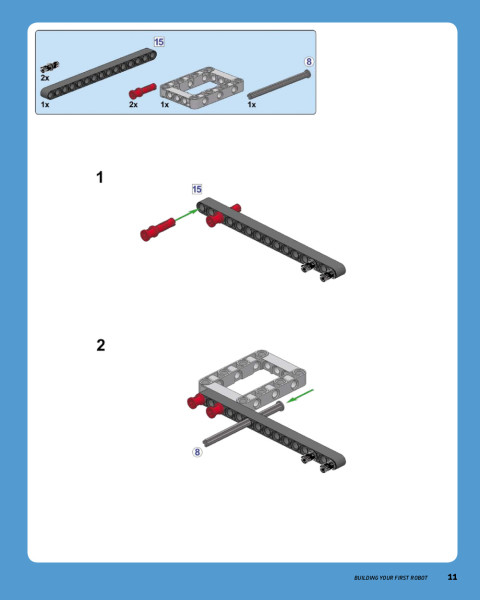
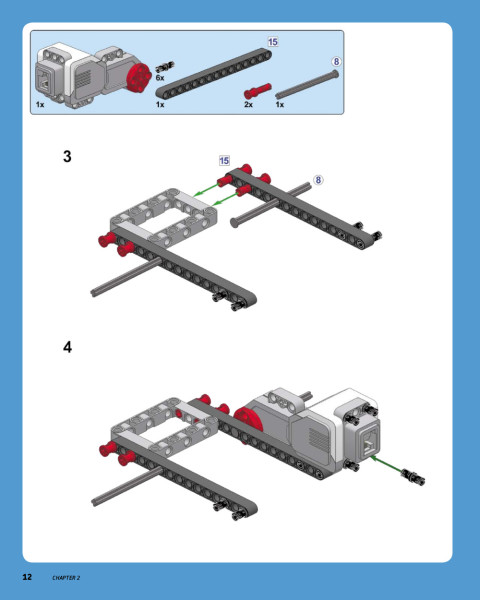
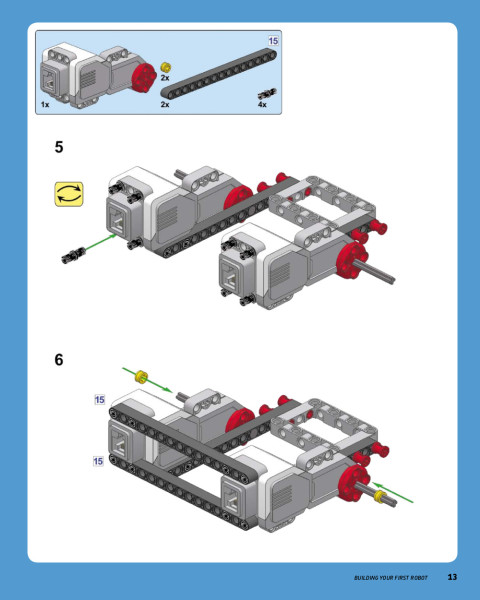
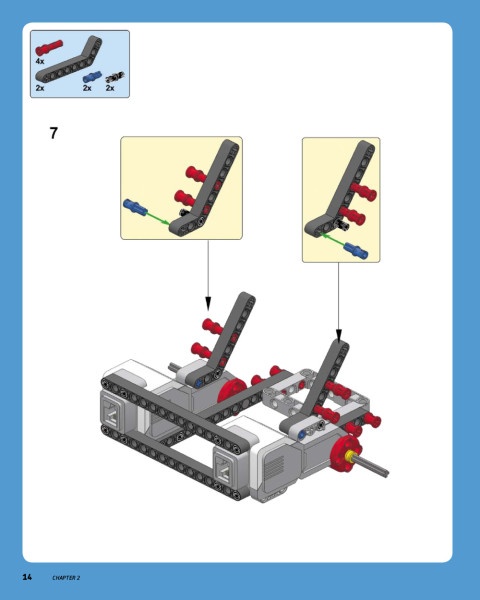
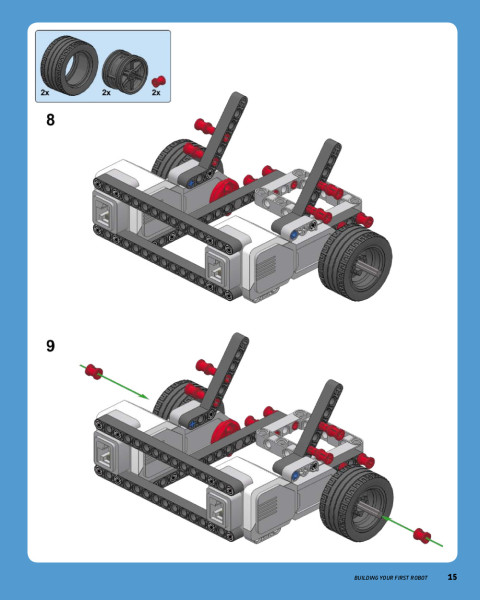
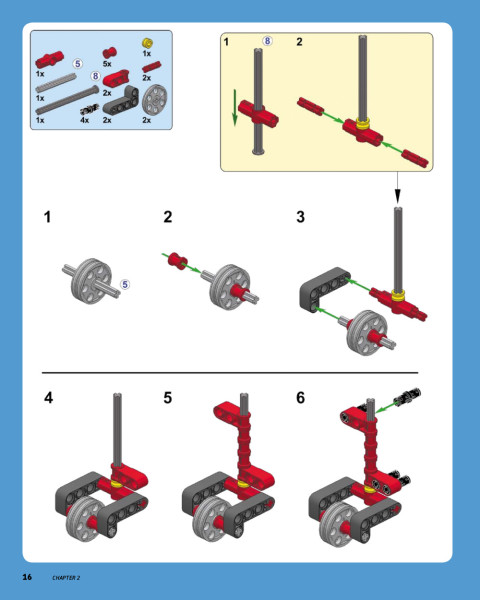
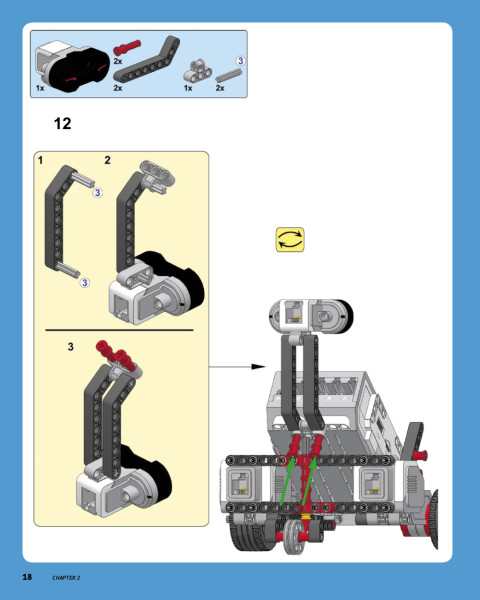
Just follow the instruction steps below—and add something cool!
Building the Base

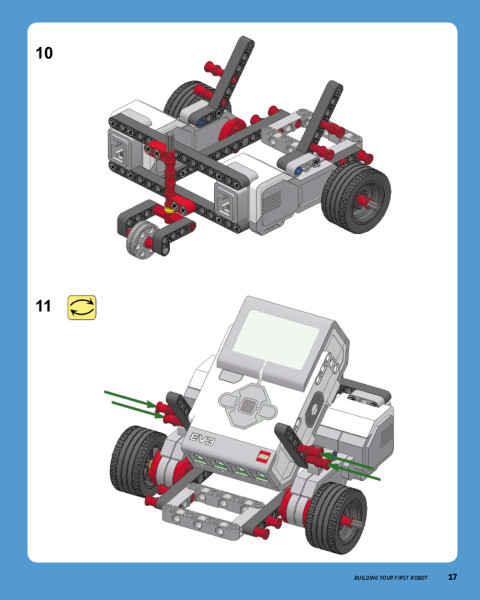
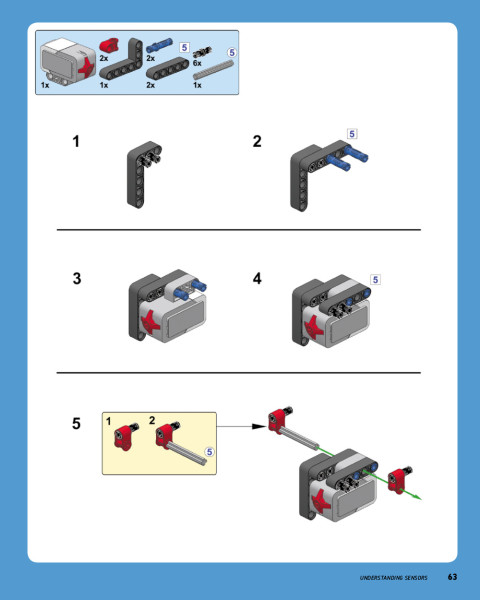
Building the Touch Sensor Attachment
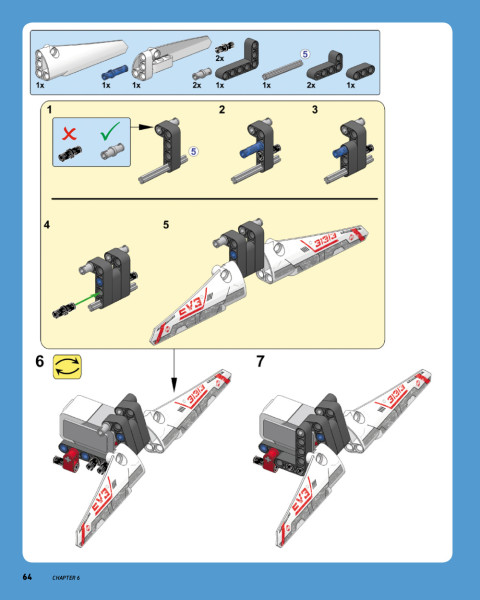
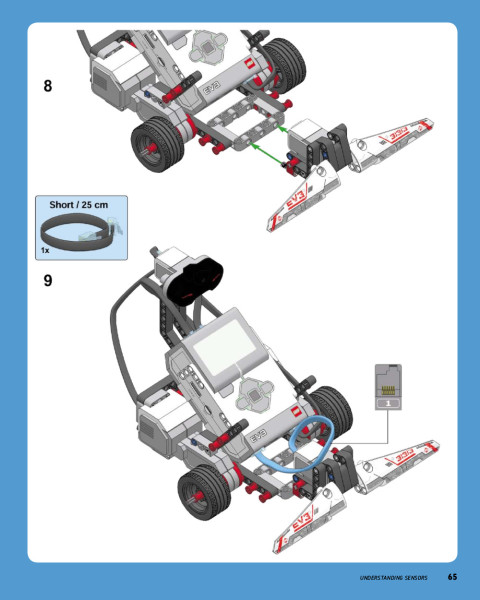
Building the Color Sensor Attachment