Программирование роботов Программирование роботов обычно является заключительным этапом, связанным с созданием роботов. Если вы изучали уроки, то вы выбрали
Изготовление робота Теперь, вы выбрали все основные компоненты для сборки робота. Изготовление робота начинается со следующего шага —
Как собрать робота Как и где собрать робота. На этом этапе у вас должны быть все основные компоненты для вашего робота. Они включают в себя приводы, контроллеры
Датчики роботов В отличие от человека, роботы не ограничены только зрением, слухом, осязанием, обонянием и вкусом. Датчики роботов бывают разных типов.
Способы управления роботом Управление роботом является сложной задачей. Определение, которое мы выбрали для «робота», требует, чтобы устройство получало
Какие бывают устройства управления Устройства управления электродвигателями необходимы для создания вашего робота. Теперь выбрана конструкция робота, исполнительные
Выбор микроконтроллера Для создания робота нужно сделать правильный выбор микроконтроллера. Сначала нужно разобраться с понятием, что такое микроконтроллер
Моторы для робота Двигатели для робота входят в состав приводов. Мы узнали о робототехнике в целом на шаге первом. На втором шаге решили, какого робота
Платформа для робота Платформа для робота имеет не самое последнее значение. Теперь после первого шага, у вас есть базовое понимание того, что такое роботы
Начало робототехники История робототехники идёт из глубокой древности и насчитывает не одну сотню лет. Еще до новой эры люди стали создавать себе автоматизированных помощников.
![]() Download Article
Download Article
![]() Download Article
Download Article
Do you want to learn how to build your own robot? There are a lot of different types of robots that you can make by yourself. Most people want to see a robot perform the simple tasks of moving from point A to point B. You can make a robot completely from analog components or buy a starter kit from scratch! Building your own robot is a great way to teach yourself both electronics as well as computer programming.
-

1
Gather your components. To build a basic robot, you’ll need several simple components. You can find most, if not all, of these components at your local electronics hobby shop, or several online retailers. In fact, some basic kits may include all of these components as well. This robot does not require any soldering:
- Arduino Uno (or other microcontroller)[1]
- 2 continuous rotation servos
- 2 wheels that fit the servos
- 1 caster roller
- 1 small solderless breadboard (look for a breadboard that has two positive and negative lines on each side)
- 1 distance sensor (with four-pin connector cable)
- 1 mini push-button switch
- 1 10kΩ resistor
- 1 USB A to B cable
- 1 set of breakaway headers
- 1 6 x AA battery holder with 9V DC power jack
- 1 pack of jumper wires or 22-gauge hook-up wire
- Strong double-sided tape or hot glue
- Arduino Uno (or other microcontroller)[1]
-
2
Flip the battery pack over so that the flat back is facing up. You’ll be building the robot’s body using the battery pack as a base.
Advertisement
-
3
Align the two servos on the end of the battery pack. This should be the end that the battery pack’s wire is coming out of The servos should be touching bottoms, and the rotating mechanisms of each should be facing out the sides of the battery pack. The servos must be properly aligned so that the wheels go straight. The wires for the servos should be coming off the back of the battery pack.
-
4
Affix the servos with your tape or glue.[2]
Make sure that they are solidly attached to the battery pack. The backs of the servos should be aligned flush with the back of the battery pack.- The servos should now be taking up the back half of the battery pack.
-
5
Affix the breadboard perpendicularly on the open space on the battery pack. It should hang over the front of the battery pack just a little bit and will extend beyond each side. Make sure that it is securely fastened before proceeding. The «A» row should be closest to the servos.
-
6
Attach the Arduino microcontroller to the tops of the servos. If you attached the servos properly, there should be a flat space made by them touching. Stick the Arduino board onto this flat space so that the Arduino’s USB and Power connectors are facing the back (away from the breadboard). The front of the Arduino should be just barely overlapping the breadboard.
-
7
Put the wheels on the servos. Firmly press the wheels onto the rotating mechanism of the servo. This may require a significant amount of force, as the wheels are designed to fit as tightly as possible for the best traction.
-
8
Attach the caster to the bottom of the breadboard. If you flip the chassis over, you should see a bit of breadboard extending past the battery pack. Attach the caster to this extended piece, using risers if necessary. The caster acts as the front wheel, allowing the robot to easily turn in any direction.[3]
- If you bought a kit, the caster may have come with a few risers that you can use to ensure the caster reaches the ground. i








Advertisement
-
1
Break off two 3-pin headers. You’ll be using these to connect the servos to the breadboard. Push the pins down through the header so that the pins come out at an equal distance on both sides.
-
2
Insert the two headers into pins 1-3 and 6-8 on row E of the breadboard. Make sure that they are firmly inserted.[4]
-
3
Connect the servo cables to the headers, with the black cable on the left side (pins 1 and 6). This will connect the servos to the breadboard. Make sure the left servo is connected to the left header and the right servo to the right header.
-
4
Connect red jumper wires from pins C2 and C7 to red (positive) rail pins. Make sure you use the red rail on the back of the breadboard (closer to the rest of the chassis).
-
5
Connect black jumper wires from pins B1 and B6 to blue (ground) rail pins. Make sure that you use the blue rail on the back of the breadboard. Do not plug them into the red rail pins.
-
6
Connect white jumper wires from pins 12 and 13 on the Arduino to A3 and A8. This will allow the Arduino to control the servos and turn the wheels.
-
7
Attach the sensor to the front of the breadboard. It does not get plugged into the outer power rails on the breadboard, but instead into the first row of lettered pins (J). Make sure you place it in the exact center, with an equal number of pins available on each side.
-
8
Connect a black jumper wire from pin I14 to the first available blue rail pin on the left of the sensor. This will ground the sensor.
-
9
Connect a red jumper wire from pin I17 to the first available red rail pin to the right of the sensor. This will power the sensor.
-
10
Connect white jumper wires from pin I15 to pin 9 on the Arduino, and from I16 to pin 8. This will feed information from the sensor to the microcontroller.










Advertisement
-
1
Flip the robot on its side so that you can see the batteries in the pack. Orient it so that the battery pack cable is coming out to the left at the bottom.
-
2
Connect a red wire to the second spring from the left on the bottom. Make sure that the battery pack is oriented correctly.
-
3
Connect a black wire to the last spring on the bottom-right. These two cables will help provide the correct voltage to the Arduino.
-
4
Connect the red and black wires to the far-right red and blue pins on the back of the breadboard. The black cable should be plugged into the blue rail pin at pin 30. The red cable should be plugged into the red rail pin at pin 30.
-
5
Connect a black wire from the GND pin on the Arduino to the back blue rail. Connect it at pin 28 on the blue rail.
-
6
Connect a black wire from the back blue rail to the front blue rail at pin 29 for each. Do not connect the red rails, as you will likely damage the Arduino.
-
7
Connect a red wire from the front red rail at pin 30 to the 5V pin on the Arduino. This will provide power to the Arduino.
-
8
Insert the push button switch in the gap between rows on pins 24-26. This switch will allow you to turn off the robot without having to unplug the power.
-
9
Connect a red wire from H24 to the red rail in the next available pin to the right of the sensor. This will power the button.
-
10
Use the resistor to connect H26 to the blue rail. Connect it to the pin directly next to the black wire that you connected a few steps ago.
-
11
Connect a white wire from G26 to pin 2 on the Arduino. This will allow the Arduino to register the push button.











Advertisement
-
1
Download and extract the Arduino IDE. This is the Arduino development environment and allows you to program instructions that you can then upload to your Arduino microcontroller. You can download it for free from arduino.cc/en/main/software. Unzip the downloaded file by double-clicking it and move the folder inside to an easy to access location. You won’t be actually installing the program. Instead, you’ll just run it from the extracted folder by double-clicking arduino.exe.[5]
-
2
Connect the battery pack to the Arduino. Plug the battery back jack into the connector on the Arduino to give it power.
-
3
Plug the Arduino into your computer via USB. Windows will likely not recognize the device.
-
4
Press .⊞ Win+R and type devmgmt.msc. This will launch the Device Manager.
-
5
Right-click on the «Unknown device» in the «Other devices» section and select «Update Driver Software.» If you don’t see this option, click «Properties» instead, select the «Driver» tab, and then click «Update Driver.»
-
6
Select «Browse my computer for driver software.» This will allow you to select the driver that came with the Arduino IDE.
-
7
Click «Browse» then navigate to the folder that you extracted earlier. You’ll find a «drivers» folder inside.
-
8
Select the «drivers» folder and click «OK.» Confirm that you want to proceed if you’re warned about unknown software.








Advertisement
-
1
Start the Arduino IDE by double-clicking the arduino.exe file in the IDE folder. You’ll be greeted with a blank project.
-
2
Paste the following code to make your robot go straight. The code below will make your Arduino continuously move forward.
#include <Servo.h> // this adds the "Servo" library to the program // the following creates two servo objects Servo leftMotor; Servo rightMotor; void setup() { leftMotor.attach(12); // if you accidentally switched up the pins for your servos, you can swap the numbers here rightMotor.attach(13); } void loop() { leftMotor.write(180); // with continuous rotation, 180 tells the servo to move at full speed "forward." rightMotor. write(0); // if both of these are at 180, the robot will go in a circle because the servos are flipped. "0," tells it to move full speed "backward." }
-
3
Build and upload the program. Click the right arrow button in the upper-left corner to build and upload the program to the connected Arduino.
- You may want to lift the robot off of the surface, as it will just continue to move forward once the program is uploaded.
-
4
Add the kill switch functionality. Add the following code to the «void loop()» section of your code to enable the kill switch, above the «write()» functions.
if(digitalRead(2) == HIGH) // this registers when the button is pressed on pin 2 of the Arduino { while(1) { leftMotor.write(90); // "90" is neutral position for the servos, which tells them to stop turning rightMotor.write(90); } }
-
5
Upload and test your code. With the kill switch code added, you can upload and test the robot. It should continue to drive forward until you press the switch, at which point it will stop moving. The full code should look like this:
#include <Servo.h> // the following creates two servo objects Servo leftMotor; Servo rightMotor; void setup() { leftMotor.attach(12); rightMotor.attach(13); } void loop() { if(digitalRead(2) == HIGH) { while(1) { leftMotor.write(90); rightMotor.write(90); } } leftMotor.write(180); rightMotor.write(0); }





Advertisement
-
1
Follow an example. The following code will use the sensor attached to the robot to make it turn to the left whenever it encounters an obstacle. See the comments in the code for details about what each part does. The code below is the entire program.
#include <Servo.h> Servo leftMotor; Servo rightMotor; const int serialPeriod = 250; // this limits output to the console to once every 1/4 second unsigned long timeSerialDelay = 0; const int loopPeriod = 20; // this sets how often the sensor takes a reading to 20ms, which is a frequency of 50Hz unsigned long timeLoopDelay = 0; // this assigns the TRIG and ECHO functions to the pins on the Arduino. Make adjustments to the numbers here if you connected differently const int ultrasonic2TrigPin = 8; const int ultrasonic2EchoPin = 9; int ultrasonic2Distance; int ultrasonic2Duration; // this defines the two possible states for the robot: driving forward or turning left #define DRIVE_FORWARD 0 #define TURN_LEFT 1 int state = DRIVE_FORWARD; // 0 = drive forward (DEFAULT), 1 = turn left void setup() { Serial.begin(9600); // these sensor pin configurations pinMode(ultrasonic2TrigPin, OUTPUT); pinMode(ultrasonic2EchoPin, INPUT); // this assigns the motors to the Arduino pins leftMotor.attach(12); rightMotor.attach(13); } void loop() { if(digitalRead(2) == HIGH) // this detects the kill switch { while(1) { leftMotor.write(90); rightMotor.write(90); } } debugOutput(); // this prints debugging messages to the serial console if(millis() - timeLoopDelay >= loopPeriod) { readUltrasonicSensors(); // this instructs the sensor to read and store the measured distances stateMachine(); timeLoopDelay = millis(); } } void stateMachine() { if(state == DRIVE_FORWARD) // if no obstacles detected { if(ultrasonic2Distance > 6 || ultrasonic2Distance < 0) // if there's nothing in front of the robot. ultrasonicDistance will be negative for some ultrasonics if there is no obstacle { // drive forward rightMotor.write(180); leftMotor.write(0); } else // if there's an object in front of us { state = TURN_LEFT; } } else if(state == TURN_LEFT) // if an obstacle is detected, turn left { unsigned long timeToTurnLeft = 500; // it takes around .5 seconds to turn 90 degrees. You may need to adjust this if your wheels are a different size than the example unsigned long turnStartTime = millis(); // save the time that we started turning while((millis()-turnStartTime) < timeToTurnLeft) // stay in this loop until timeToTurnLeft has elapsed { // turn left, remember that when both are set to "180" it will turn. rightMotor.write(180); leftMotor.write(180); } state = DRIVE_FORWARD; } } void readUltrasonicSensors() { // this is for ultrasonic 2. You may need to change these commands if you use a different sensor. digitalWrite(ultrasonic2TrigPin, HIGH); delayMicroseconds(10); // keeps the trig pin high for at least 10 microseconds digitalWrite(ultrasonic2TrigPin, LOW); ultrasonic2Duration = pulseIn(ultrasonic2EchoPin, HIGH); ultrasonic2Distance = (ultrasonic2Duration/2)/29; } // the following is for debugging errors in the console. void debugOutput() { if((millis() - timeSerialDelay) > serialPeriod) { Serial.print("ultrasonic2Distance: "); Serial.print(ultrasonic2Distance); Serial.print("cm"); Serial.println(); timeSerialDelay = millis(); } }
Add New Question
-
Question
How much time will it take to build a robot?

This depends on the complexity of the robot. You could build a simple robot in as little as a day. A more complex robot could take several several months.
-
Question
What is the device called that you need to move robotic hands, arms and legs?
Servos (servomotors) are usually used to move robotic arms. Regular servos have a limited circulation.
-
Question
Why do I need to download the Arduino software?
Arduino code is very simplified and based off of C++. Other micro controllers are also available that use other software.
See more answers
Ask a Question
200 characters left
Include your email address to get a message when this question is answered.
Submit
Advertisement
Thanks for submitting a tip for review!
References
About This Article
Article SummaryX
To build a simple robot that can move on its own, purchase a starter kit, or assemble the components you need from an electronics supplier. You’ll need a microcontroller, the small computer that will serve as your robot’s brain; a pair of continuous rotation servos to drive the wheels; wheels that fit the servos; a caster roller; a small solderless breadboard for building your circuits; a battery holder; a distance sensor; a push button switch, and jumper wires. Affix the servos to the end of the battery pack with double-sided tape or hot glue, making sure the the rotating ends of the servos are on the long sides of the battery pack. Attach the breadboard to the battery pack next to the servos with the tape or hot glue. Place the microcontroller on the flat space on top of the servos and affix firmly there. Press the wheels firmly onto the spindles of the servos. Attach the caster to the front of the breadboard. The caster spins freely, and acts as the front wheel of the robot, making it easy to turn and roll in any direction. Plug the distance sensor to the front of your breadboard. Wire up your robot, connecting the servos, microcontroller, switch and battery pack to your breadboard. Connect your microcontroller to a computer via a USB cable. Upload a basic control program from your computer to the microcontroller. This robot can go forward, backward, stop, and turn away from obstacles. Test your robot on a smooth flat surface, and experiment to see what you can make it do. For more tips, including how to use Arduino software, read on!
Did this summary help you?
Thanks to all authors for creating a page that has been read 1,714,492 times.
Reader Success Stories
-

«The fact that you actually give a list of supplies is great. This is the first website that I found that actually…» more
Is this article up to date?
Сборку робота мы вели в следующей последовательности:
- Этап 1 – установка колёс, моторов, энкодеров и датчиков линии на круглую пластину. Установка держателя основной батареи, выключателя питания и гнезда подзарядки. Сборка электрических цепей питания.
- Этап 2 – установка платы Arduino UNO и подключение её к цепям электропитания.
- Этап 3 – установка платы MotorShield и подключение её к цепям электропитания и моторам.
- Этап 4 – установка платы TroykaShield и подключение к ней кабелей энкодеров и датчиков линии.
Этап 1
- Сначала надо закрепить пластмассовыми держателями на круглой пластине два электромотора с колёсами и энкодерами (если Вы используете энкодеры). К электрическим выводам моторов надо аккуратно припаять провода длиной по 15 сантиметров. Эти провода впоследствии будут подключаться к винтовым зажимам платы MotorShield. Для того чтобы избежать случайного обрыва прижмите их к пластине каким-нибудь зажимом с винтом. Зажим можно сделать из кусочка фанеры или пластика.
- Затем надо прикрепить к круглой пластине шаровую опору. Наш робот опирается на три точки – два колеса и шаровую опору. Опора расположена снизу в корме робота. А блок батарей – сверху прямо над шаровой опорой.
- Затем следует разместить впереди по ходу движения два датчика линии. Датчики расположены сверху круглой пластины, но их фотоэлементы смотрят вниз через отверстия в ней. Для того чтобы датчики не вылезали за контур, надо надфилем немного расширить соответствующие отверстия в пластине.
- От датчиков линии и энкодеров идут кабели (по три провода в каждом). Кабели поставляются в комплекте с датчиками и энкодерами. Если Вы используете и датчики линии, и энкодеры, то у Вас будет шесть кабелей по три провода, которые впоследствии будут подключаться к контактам платы TroykaShield сверху. Пока просто свяжите эти кабели в один пучок и выведите его за пределы пластины спереди.
- Далее надо разместить в корме робота пластмассовый блок для аккумуляторов основного питания. Лучше всего закрепить блок вертикально на коротких стойках высотой 5 мм. Возможно, для этого придётся просверлить в круглой пластине дополнительные отверстия. Стойки можно прикрепить к самому блоку винтами, пропустив их через отверстия, к которым крепятся плюсовые электрические контакты для аккумуляторов. Если стойки металлические, то надо быть внимательным – на них будет присутствовать напряжение от аккумуляторов. Напряжение, которые мы используем, безопасно для человека, но для электроники оно может быть губительным. Поэтому следует убедиться, что стойки касаются только блока аккумуляторов и пластмассовой круглой пластины – основания робота.
- Тумблер отключения питания надо приклеить к блоку аккумуляторов так, чтобы его рычажок смотрел назад. Разъём блока подзарядки требуется разместить на пластине, предварительно просверлив для него отверстие в удобном месте.
- Четыре аккумулятора в передней части пластмассового блока батарей лучше установить до монтажа платы Arduino UNO. Впоследствии надо будет поместить кусочек тонкого картона между аккумуляторами и пакетом плат для того чтобы исключить их касание.
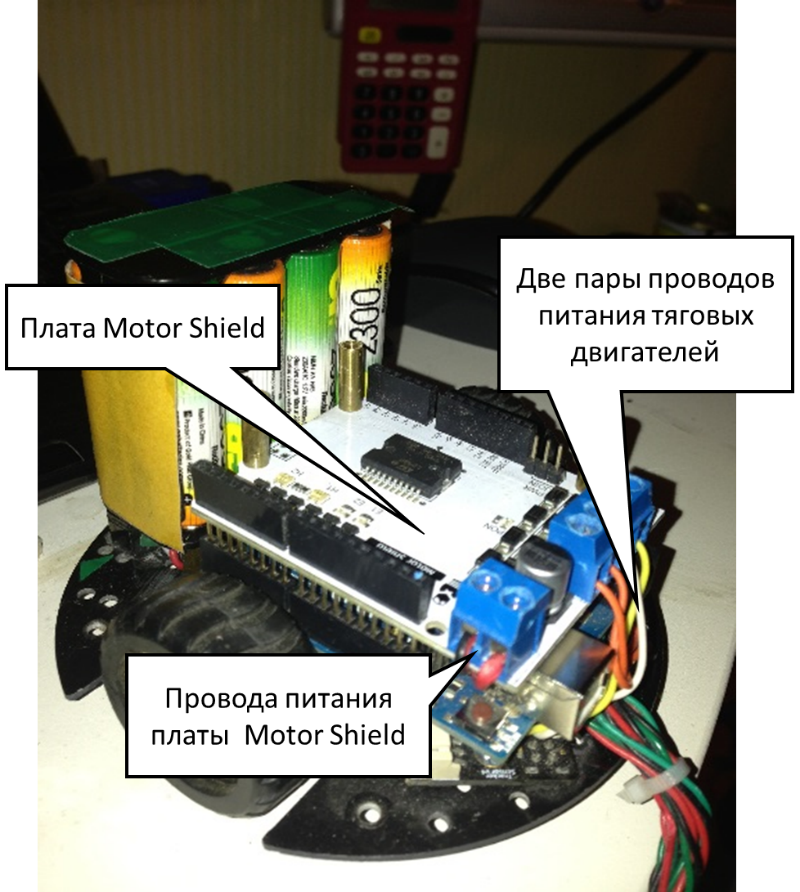
- Блок аккумуляторов, тумблер выключения питания и разъём для подзарядки соединяются электрическими проводами посредством пайки так, чтобы получить на выходе две пары проводов подводки электропитания к платам Arduino UNO и MotorShield. Подключение питания потребует отдельной работы, поэтому её описание выведено в особый раздел “Система питания робота”.
Что должно получиться, можно увидеть на фотографии.

Этап 2
Следующий этап сборки робота – монтаж и электрическое подключение платы Arduino UNO.
- Приложите плату Arduino UNO к роботу сверху так, чтобы разъёмы USB и питания платы смотрели вперёд по ходу движения. Сама плата должна располагаться между колёсами робота, над моторами и датчиками линии, не касаясь их.
- У платы Arduino UNO есть четыре отверстия для крепления её на стойки. В нашем случае можно использовать только три из них, так как одно расположено слишком близко к электрическим элементам платы и поставить там стойку не удастся.
- Закрепите плату на круглой пластине тремя стойками так, чтобы плата не касалась других элементов робота. Возможно, придётся просверлить в пластине дополнительные отверстия для того, чтобы стойки крепления стояли строго вертикально. Прижмите плату к стойкам, завинтив другие стойки поверх платы. На следующем этапе на эти стойки ляжет плата MotorShield. Длина верхних стоек должна быть либо 10, либо 15 миллиметров, в зависимости от длины штырей платы MotorShield.
- Далее надо подвести к плате электропитание от одной из пар проводов, которые мы сделали на предыдущем этапе. Тут есть два варианта. Либо припаять провода непосредственно к площадкам платы Arduino UNO снизу. Либо припаять провода к разъёму, который будет вставляться в разъём питания платы. Любой вариант годится. Наши ученики выбрали первый.
Должно получиться, как показано на фотографии ниже. Неподключенными останется пара проводов питания платы MotorShield, четыре провода от моторов, которые впоследствии мы подключим к винтовым зажимам платы MotorShield, и пучок проводов от датчиков линии и энкодеров.

Этап 3
Теперь пришло время закрепить на роботе плату MotorShield и подключить к ней питание и моторы.
Это очень просто – аккуратно вставляем контакты боковых разъёмов платы MotorShield в гнёзда платы Arduino UNO и навинчиваем поверх MotorShield три стойки, на которые впоследствии будет крепиться плата TroykaShield.
Здесь есть небольшая тонкость. Как говорилось выше, высота стоек между платами должна быть либо 10, либо 15 мм в зависимости от длины контактов боковых разъёмов плат.
Следить за этим надо, потому что стойки крепления должны давать возможность контактам полностью войти в гнёзда электрических разъёмов. Иначе робот будет работать неустойчиво или вообще не будет работать.
В принципе свинчивать платы стойками не обязательно; можно обойтись только боковыми разъёмами. Робот будет работать и без стоек. Но со стойками робот выглядит надёжнее.
После механического крепления платы MotorShield надо подключить к ней провода питания и моторов. Все эти провода подключаются к винтовым зажимам на плате.
Сначала подключается питание. Обратите внимание на полярность подключения – “плюс” батареи к “плюсу” платы, и “минус” батареи к “минусу” платы. Если перепутать, большой беды не будет, – на плате есть устройства защиты от переполюсовки, но работать плата и моторы не будут.
Пары проводов от моторов надо подключить, соответственно, к парным (правому и левому) входам платы. Полярность здесь важна, но на данном этапе некритична. Если мы перепутаем полярность, то моторы будут крутиться в сторону противоположную той, на которую мы рассчитываем.
В этом случае надо будет просто поменять подключение проводов от соответствующего мотора.
Что действительно важно – убедится, что оба провода от правого мотора подключены к одному парному входу, а оба провода левого – к другому. Если мы перепутаем левую и правую пару, то на этапе настройки программы драйвера мы так же это увидим и просто поменяем подключение пар проводов.
Должно получиться что-то подобное на фотографии внизу. Неподключённым останется пучок кабелей от энкодеров и датчиков линии. На фотографии видно, как он спускается под крышку стола.
Этап 4
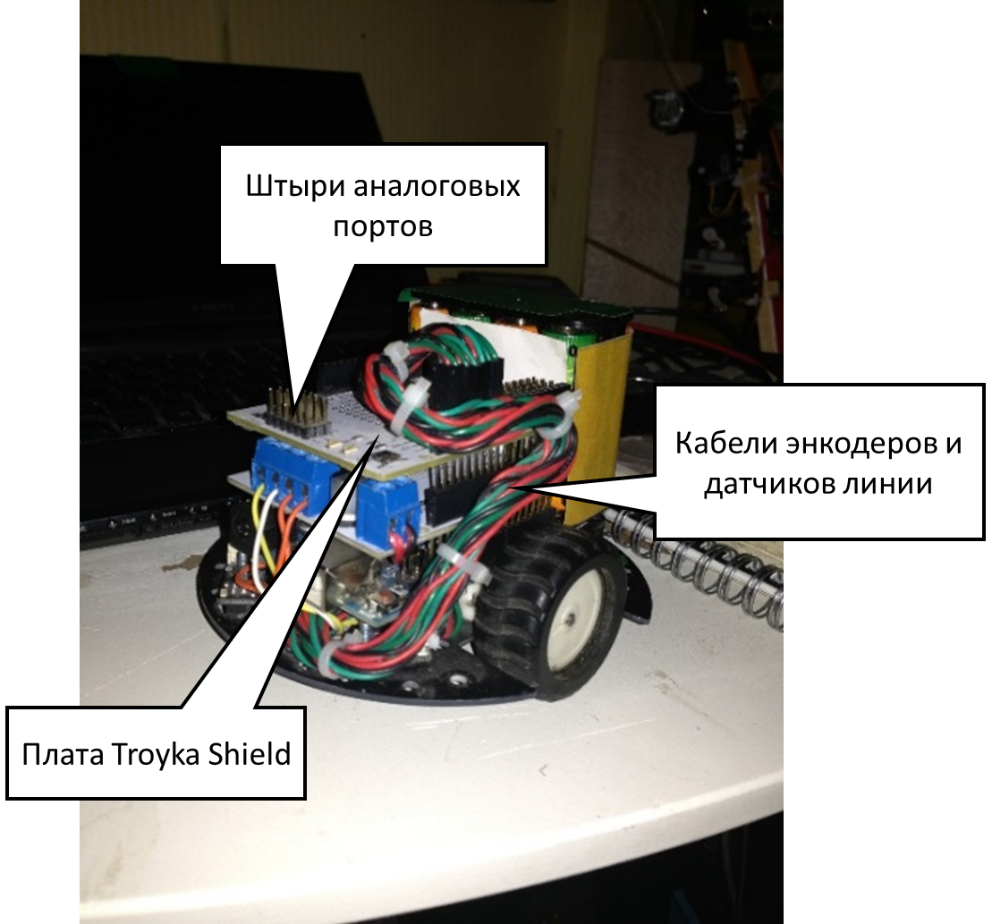
Теперь подключим плату Troyka Shield. Для этого просто аккуратно вставим контакты боковых разъёмов платы в гнёзда платы MotorShield и закрепим плату на стойках. Плата TroykaShield последняя в пакете электроники робота, поэтому стойки нам уже не нужны. Можно прикрепить плату простыми винтами.
Почему контакты боковых разъёмов одной платы нужно вставлять в гнёзда другой платы аккуратно? Дело в том, что число пар гнездо-контакт на платах очень много. Если хоть одна пара не будет соединена или соединена неправильно, то робот работать не будет, а электроника может быть испорчена.
Если у Вас есть датчики линии и энкодеры, то теперь можно подключить к плате Troyka Shield пучок проводов от них. Как это сделать описано в разделе “Провода энкодеров и датчиков линии”.
На фотографии ниже Вы можете видеть, что получилось после этого этапа работ.
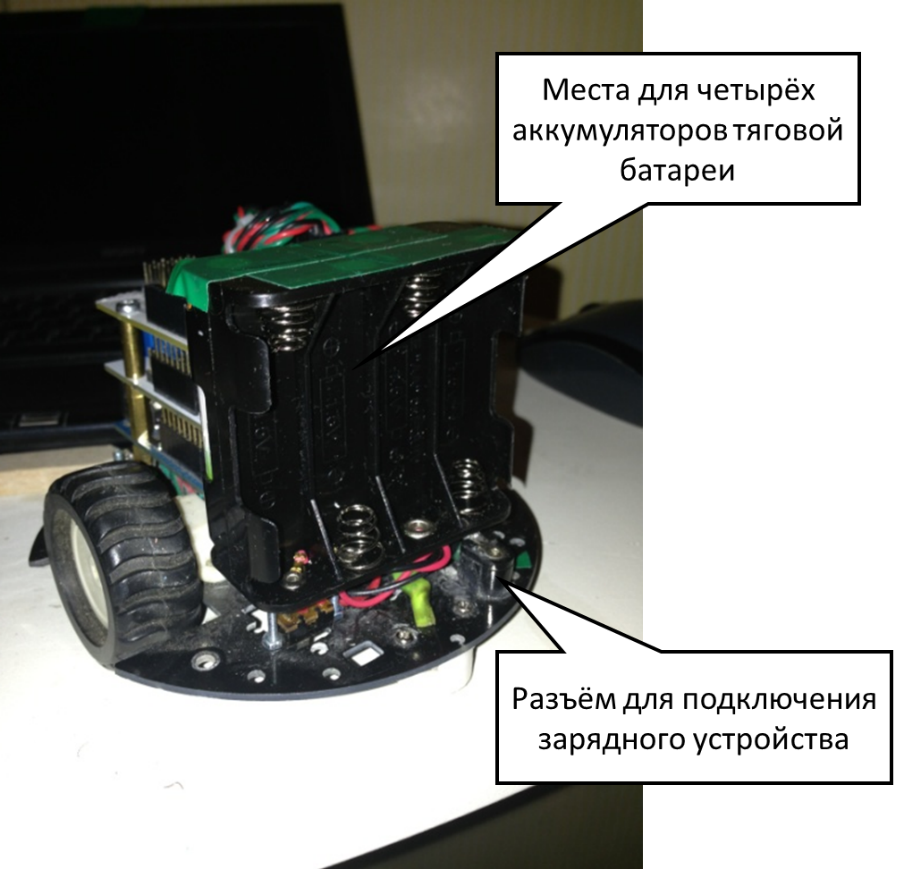
Теперь пора вставить ещё четыре аккумулятора в заднюю часть пластмассового блока батарей, и аппаратная часть робота готова.
Содержание
- 1 Робот, реагирующий на источник света
- 1.1 Необходимые инструменты и детали
- 1.2 Процесс сборки
- 2 Робот, различающий препятствия
- 2.1 Инструменты и запчасти
- 2.2 Работа с платой
- 2.3 Управление двигателями
- 2.4 Установка датчиков препятствий
- 2.5 Прошивка робота
- 3 Роботы для детей
- 4 Полезные роботизированные устройства для начинающих
- 5 Необходимые навыки
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Самостоятельно собранный робот, реагирующий на источник света, может стать прототипом робота-плантатора НЕХА, который будет «гоняться» за солнечным светом, столь необходимым для домашних растений.
Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Первоначально запаивают датчики с учетом полярности подсоединения фотодиодов и фототранзисторов. Их размещают по углам платы с одного края, располагая так, чтобы они смотрели в разные стороны. Это передняя часть робота, его «глаза».
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Конфигурация «светолюбивого» робота может быть любой и зависеть от наличия необходимых материалов, предпочтений и фантазии создателя.
Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.

Создание робота, способного различать препятствия, — первый серьезный шаг к профессии будущего.
Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Наилучший вариант знакомства детей с миром робототехники — конструирование и программирование Lego-роботов (EV3 и Boost).
Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
- со знакомства с наборами для конструирования и программирования Lego BOOST (7-12 лет) и Lego EV3 (с 10 лет);
- с конструирования вибророботов, предназначенных для детских игр;
- с занятий с использованием электронных конструкторов «Знаток»;
- со сборки простых конструкторов для начинающих на основе Arduino;
- с конструирования моделей, представленных обучающими конструкторами Engino.
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
Три закона робототехники
Компьютерный ученый Кристоф Солдж пытается устранить необходимость в правилах, которые управляют поведением роботов. Его стратегия — дать им цель: сделать нас более могущественными. Кристоф работает в Game Innovation Lab при Нью-Йоркском университете. Саша Маслов взяла интервью у Солджа для Quanta Magazine, из которого мы узнаем, что нам, возможно, вовсе не стоит пытаться удержать неудержимый поток технологической сингулярности.

Знаменитые три закона робототехники Айзека Азимова — ограничения поведения андроидов и автоматов, необходимые для обеспечения безопасности человечества — также были незавершенными.
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
- Робот должен подчиняться приказам, отдаваемым людьми, если таковые не противоречат Первому Закону.
- Робот должен защищать свое существование, если эта защита не противоречит Первому или Второму Закону.
Конечно, в этих законах можно найти множество противоречий и лазеек (чем, собственно, пользовался и сам Азимов). В наш нынешний век продвинутого программного обеспечения с машинным обучением и автономной робототехникой, определение и внедрение железной этики искусственного интеллекта стало актуальной проблемой для таких организаций, как Институт исследований машинного интеллекта и OpenAI.
Нюансы создания роботов
Из чего можно сделать робота своими руками? Это зависит от того, кто будет этим заниматься.

Если ребёнок, то его родителям следует предложить ему внимательно просмотреть модели из ненужных коробок, картона, бумаги, спичечных коробков, сигаретных пачек, пластиковых бутылок, съедобной мастики, чтобы выбрать подходящий вариант.

Маме легче создать для ребёнка вязаного или съедобного киборга. А если созданием робота планирует заняться папа, то чадо может рассчитывать на более сложную конструкцию, например, получить высокотехничного андроида.

Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
- со знакомства с наборами для конструирования и программирования Lego BOOST (7-12 лет) и Lego EV3 (с 10 лет);
- с конструирования вибророботов, предназначенных для детских игр;
- с занятий с использованием электронных конструкторов «Знаток»;
- со сборки простых конструкторов для начинающих на основе Arduino;
- с конструирования моделей, представленных обучающими конструкторами Engino.
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
Робот из подручных средств

Сегодня мы расскажем, как сделать робота из подручных средств. Получившийся «высокотехнологичный андроид» хоть и будет небольшого размера и навряд ли сможет помочь вам по хозяйству, но пренепременно развеселит как детей, так и взрослых.
Для того, чтобы сделать робота своими руками, не понадобится знание ядерной физики. Это можно сделать и в домашних условиях из обычных материалов, которые постоянно есть под руками. Итак, что нам понадобится:
- 2 куска провода
- 1 моторчик
- 1 батарейка AA
- 3 канцелярские кнопки
- 2 кусочка пенокартона или похожего по свойствам материала
- 2-3 головки старых зубных щеток или несколько скрепок

1. Прикрепляем батарейку к мотору
С помощью клеящего пистолета прикрепляем кусочек пенокартона к корпусу мотора. Затем к приклеиваем к нему батарейку.


2. Дестабилизатор
Этот шаг может показаться не совсем понятным. Однако, чтобы сделать робота, необходимо заставить его двигаться. Надеваем на ось мотора маленький продолговатый кусочек пенокартона и закрепляем его с помощью клеевого пистолета. Такая конструкция придаст мотору дисбаланс, что и приведет всего робота в движение.

На самый конец дестабилизатора капните пару капель клея, или прикрепите какой-нибудь декоративный элемент — это добавит нашему творению индивидуальности и увеличит амплитуду его движений.

3. Ноги
Теперь необходимо снабдить робота нижними конечностями. Если вы будете использовать для этого головки зубных щеток, то приклейте их к нижней части мотора. В качестве прослойки можно использовать всё тот же пенокартон.




4. Провода
Следующим шагом прикрепим два наших отрезка провода к контактам моторчика. Можно их просто прикрутить, но ещё лучше будет припаять их, это сделает робота более долговечным.

5. Подключение батарейки
Используя термопистолет, приклеем провод к одному из концов батареи. Можете выбрать любой из двух проводов и любую сторону батареи — полярность в данном случае роли не играет. Если у вас хорошо получается паять, в этом шаге также можно воспользоваться пайкой вместо клея.


6. Глаза
В качестве глаз робота вполне подойдет пара бусинок, которые прикрепляем термоклеем к одному из концов батарейки. На этом шаге можно проявить фантазию и придумать внешний вид глаз на своё усмотрение.

7. Запуск
Теперь давайте оживим нашу самоделку. Возьмите свободный конец провода и прикрепите его с незанятому контакту батареи с помощью липкой ленты. Не стоит использовать на этом шаге термоклей, потому что это не позволит вам при необходимости отключить мотор.

Робот готов!

А вот как может выглядеть наш самодельный робот, если проявить больше фантазии:


И напоследок видеоролик:
Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Первоначально запаивают датчики с учетом полярности подсоединения фотодиодов и фототранзисторов. Их размещают по углам платы с одного края, располагая так, чтобы они смотрели в разные стороны. Это передняя часть робота, его «глаза».
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают не большые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот с искусственным интеллектом своими руками
Конструктор был представлен подразделением Google Creative Lab. Робот называется ALTO, что является сокращением от «A Little Teachable Object» (маленький обучаемый объект). Проект создан для того, чтобы люди смогли собрать робота на дому и получили базовые знания о машинном обучении. Машинным обучением называется умение искусственного интеллекта самостоятельно вырабатывать навыки выполнения новых задач. В ходе сборки робота ALTO, люди должны понять, как научить робота самостоятельно понимать и выполнять задачи. По крайней мере, компания Google на это надеется.
Интересный факт: ученые уверены, что в будущем большую часть ручного труда будут выполнять роботы. Чтобы не остаться без работы, людям необходимо уже сейчас изучать программирование, ведь роботами должен кто-то управлять. Так что знать, что такое машинное обучение и как оно работает, важно всем. И робот ALTO, возможно, сможет быстро ознакомить людей с этой темой.
Схема для создания корпуса робота из бумаги и исходный код программы для его работы можно найти на сайте Experiments with Google (кнопка Get the code). Но это еще не все, потому что для создания робота нужна электроника, которую нужно купить:
- Coral USB Accelerator — это устройство, которое включает в себя процессор Edge TPU. Он нужен для того, чтобы робот обладал способностью к машинному обучению. Его можно купить на Aliexpress;
- Raspberry Pi 4 — небольшой компьютер размером с банковскую карту. К нему можно будет подключить камеру, динамики и прочее оборудование, нужное для робота. Он тоже есть на Aliexpress.
Программирование робота
Для обучения робота нужно будет использовать платформу TensorFlow, которая включает в себя инструменты для тренировки нейронных сетей (можно сказать, для создания искусственного интеллекта). Звучит сложно, да и цена устройства Coral USB Accelerator и компьютера Raspberry Pi 4 может озадачить. Но ведь речь идет о достаточно серьезном устройстве, в ходе создания которого человек получает навыки, которые могут пригодиться ему в высокотехнологичном будущем. Знание английского тоже обязательно, потому что инструкция по сборке робота ALTO и его настройке выложены на GitHub и не переведены на русский.
Робот ALTO может распознавать предметы и многое другое — главное, научить его этому
Представители Google считают, что робота можно научить выполнению самых разных задач. Самая простая из них — распознавание предметов. Если перед камерой робота поставить яблоко, он может поднять левую руку. А если поставить банан — правую. Это только самые банальные примеры, а на деле, полученные в ходе сборки робота знания, должны помочь в создании более навороченных устройств. Глядишь, кто-нибудь сможет даже разработать собственный робот-пылесос или создать охранную систему с распознаванием лиц.
Многие люди ассоциируют будущее именно с роботами. Считается, что когда-нибудь они смогут ходить по улицам наравне с людьми и это будет вполне привычным явлением. На данный момент на улицах можно встретить разве что роботов-курьеров, и то редко. Одного из самых интересных роботов для доставки посылок недавно представила компания Hyundai. Он стал очень обсуждаемым — в чем заключается его главная особенность, можно почитать в этом материале.
Хочу стать инженером и собрать робота. У меня получится?
Можно подумать, что робототехника — занятие для умников и выпускников физтеха, но это не так. На самом деле простых роботов строят даже младшие школьники, поэтому вам это тоже под силу.
Что мне потребуется?
В первую очередь — микроконтроллер. Он станет мозгом будущего робота. Можно сказать, что микроконтроллер — это крошечный компьютер, размещенный на одной микросхеме. У него есть процессор, оперативная и постоянная память и даже периферийные устройства: интерфейсы ввода и вывода данных, различные таймеры, передатчики, приспособления, которые инициируют работу двигателей. Набор устройств зависит от конкретной модели. Именно микроконтроллер будет получать информацию от внешнего мира через датчики движения, фотокамеры и прочие приспособления, анализировать ее и побуждать робота совершать в ответ какие-то действия.

Микроконтроллер нужно будет установить на печатную плату, запитать его, подсоединить все необходимые устройства (датчики, лампочки, двигатели), а еще собрать из подручных материалов корпус робота. Все детали, которые для этого нужны, можно купить в любом магазине радиотехники.
Если у вас нет профильного образования или опытного наставника, который подробно объяснит, что именно и в какой последовательности устанавливать (и как пользоваться паяльником!), готовьтесь к долгой и кропотливой работе: придется перерыть интернет вдоль и поперек и испортить множество деталей.
Я в ужасе и собираюсь передумать. Нельзя попроще?
Можно. Специально для тех, кто никогда не держал в руках паяльник, но очень хочет попробовать себя в робототехнике, существуют специальные наборы-конструкторы, позволяющие сделать всё то же самое, но быстрее. Самый известный и популярный — Arduino. Его главное преимущество в том, что это не просто игрушка, а целая экосистема: множество обучающих материалов и инструкций, видеокурсы, огромное пользовательское комьюнити — можно задать любой вопрос от новичкового до самого продвинутого. Есть и другие платформы — например, совсем простой конструктор Mindstorms от Lego.
Составы наборов могут быть очень разными, но в каждом есть готовая печатная плата с уже установленным микроконтроллером и всеми дополнительными деталями, которые нужны для решения простых типовых задач. Обычно плату можно напрямую подключить к компьютеру через USB. А дальше среда разработки от производителя поможет сразу же сделать первые шаги в программировании роботов. Например, заставить мигать лампочку на плате.
Теперь всё зависит от вас. Можно, используя готовую плату, реализовать собственный несложный проект: например, сделать машинку, которая движется и останавливается по команде, или гирлянду для новогодней елки. Можно купить набор, уже включающий в себя всё, что нужно для постройки робота определенного типа, и потренироваться на нем. Плюс этого варианта: все детали в наборе подготовлены так, чтобы вы могли соединить их без паяльника или других инструментов.
У меня в школе была двойка по физике, и вообще я гуманитарий. Мне нужно что-то выучить, прежде чем приступать?
Штурмовать учебники необязательно. Конечно, школьная физика пригодилась бы, но если вы ее забыли, не переживайте — вспомните по ходу дела. Для начала просто погуглите, что такое ток, сопротивление, закон Ома, конденсатор, транзистор — пара десятков статей дадут вам базовые представления о радиотехнике, и этого хватит на первое время. Позже вы легко найдете в сети всю информацию, которая вам понадобится. И усвоите ее на практике — гораздо лучше, чем из учебника.
А программировать надо уметь?
Если умеете, создание первого робота окажется, возможно, даже слишком легким делом. Если не умеете — отличный повод научиться. Дело в том, что программирование робота — штука очень наглядная: вот вы написали код и сразу же загорелась лампочка. Вам нужно, чтобы ваш робот разворачивался, когда до стены осталось меньше 5 см, значит, в программе надо прописать такое условие, всё логично. Именно поэтому детей часто начинают учить программированию на примере робототехники: здесь вместо скучных абстракций сразу получается осязаемый результат в реальном мире. На этом принципе строится обучение по программе «Робототехника». Все участники сразу же могут применить полученные знания на практике.

Перед первой попыткой написать программу для робота достаточно разобраться, что такое цикл и условный оператор. Для тех, кому и это кажется слишком сложным, производители конструкторов часто предусматривают визуальные редакторы: там код вообще не нужно писать, всё настраивается перетаскиванием блоков мышкой. Конечно, никакого сложного функционала так не напрограммируешь, но это уже начало. Позже, если захотите заниматься робототехникой углубленно, полезно будет освоить язык С, который чаще всего используется в этой сфере.
Меня случайно не убьет током?
Нет. Если, конечно, вы не собираетесь начать сразу с постройки огромных промышленных роботов. Пока речь идет о небольших игрушках, сила тока и напряжение настолько малы, что даже если вас и ударит, то вы ничего не почувствуете. Самое страшное, что можно сотворить, конструируя маленького робота, — небольшой взрыв на столе. Но это случится, только если вы перепутаете «плюс» с «минусом» во время работы с электролитическим конденсатором.
Самая вероятная неприятность — некоторое количество испорченных деталей, которые вы попытаетесь подсоединить не так и не туда. Но переживать не стоит: все необходимые расходники недороги, а их поломка тоже важная часть обучения.
Где можно узнать больше о роботах?
Можно пройти один из многочисленных, в том числе совершенно бесплатных онлайн-курсов. Можно выбрать курс, посвященный Arduino, — как, например, этот от МФТИ, или начать с Lego. А можно не привязываться к конкретной платформе и учиться робототехнике в целом — например, на этом курсе от Бауманки. Ну а если вы знаете английский, буквально вся Coursera с программами по робототехнике от ведущих мировых университетов к вашим услугам.
Робот из пластиковых бутылок
Делать робота можно и из самого простого материала – пластиковых бутылок. Для поделки приготовьте:
- непрозрачную бутылку из-под колы;
- игрушечное ведерко из набора детской посуды;
- две вилки;
- три крышечки от пластиковых бутылок;
- два колеса от игрушечного автомобиля, соединенные шасси.

- Снизу по бокам бутылки проделываем два отверстия, в которые продеваем шасси и прикручиваем колесики. Сгибаем две вилки – это руки – и крепим к туловищу сзади на болты. На голову надеваем ведерко, к которому прикрепляем две крышечки побольше – это глаза, и одну поменьше посередине – это рот. Украшаем робота, как подскажет фантазия.

Робот из спичечных коробков
Такая самоделка до неприличия проста в изготовлении, но очень симпатична. Она создаётся из девяти коробков, цветной бумаги и клея.

Коробки нужно обклеить цветной бумагой и сформировать из них фигурку робота. Не забудьте прорисовать лицо фломастером, и прикрепить антенны из спичек.
Из Лего
Конструкторы Лего состоят из множества деталей, которые можно крепить друг другу не только по прилагаемым схемам, но и произвольно.
Алгоритм изготовления в любом случае предписывает начинать сборку со ступней:
- Их делают из квадратных или прямоугольных деталей.
- Далее крепятся большие детали для ног. Как только ноги станут желаемой длины, их необходимо соединить прямоугольной деталью, которая послужит основанием для корпуса.
- Нижняя часть туловища может быть узкой, а вот грудная и плечевая – пошире.
- К плечам крепятся руки и голова.
- В руки дать пушку или прикрепить целый арсенал к рукам, спине, плечам. Если «посадить» макет на колесо, то получится робот на мотоцикле.

Новогодний костюм
Если коробки у вас большие, можно из них сделать маскарадный костюм для ребенка. В этом случае коробку-голову сразу приклеить к коробке-туловищу. На голове вырезать квадратное отверстие, чтобы малыш мог смотреть через него.

Внутри сделать прорезь для головы сынишки. А руки и ножки роботу смастерить из гибких вентиляционных труб, выбрав нужный диаметр.

Робот из консервных банок
Красивый робот получается из консервных банок. Нужно вставить одну банку в другую. Руки и ноги сделать из металлических крышечек, которыми закрываются стеклянные поллитровые бутылки с напитками. Просверлив в центре каждой крышечки отверстие, их нужно стянуть между собой на проволоку, закрепив концы. Спереди на корпус робота прикрутить болтами две такие же крышечки.
На верхней банке вырезать отверстие – рот, прикрутить два болта – глаза. А уши сделать из кругов из фольги, закрепив их по бокам так, чтобы они торчали в разные стороны.
Не забудьте сделать фото вашей работы поэтапно и выложите на свою страничку в соцсеть. Пусть посетители позавидуют вашим умениям, а, может, даже переймут неординарный опыт.
Собрать робота в мастерской или лаборатории
Есть несколько возможных сценария для оснащения роботизированной лаборатории. Выбор приборов и инструментов, которые нужно добавить в вашу лабораторию, зависит от того, сколько роботов вы планируете сделать. И в первую очередь от того, как вы занимаетесь робототехникой и какой результат вы хотели бы получить.
В мире есть много конструкторов робототехники, у которых есть инструменты из нескольких типов лабораторий. И у них может быть свой набор приборов и инструментов, который они считают необходимым для того чтобы собрать робота.
- Первый тип мастерской предназначен для начинающих разработчиков роботов. Скорее всего они будут создавать несколько недорогих роботов для развлечения. Возможно будут заниматься каким-нибудь одним несложным проектом. Это мастерская с небольшим количеством недорогих инструментов. Но при правильном подходе и в правильных руках такая мастерская может быть использована для создания профессиональных роботов.
- Следующий тип мастерской является промежуточным типом между простой и профессиональной мастерской. Такая лаборатория подойдет для разработчиков, которые не являются «профессиональными». При этом они готовы вкладывать немного больше средств в оборудование, чтобы облегчить изготовление, сборку, тестирование и устранение неполадок. В результате здесь собрать робота будет намного проще.
- Профессиональная мастерская предназначена для пользователей, которые планируют создавать множество продвинутых роботов и прототипов. Они используют различные детали и материалы. Этот тип конструкторов робототехники хочет, чтобы готовый прототип выглядел настолько профессиональным, насколько возможно. Наконец они могут даже хотеть произвести небольшие производственные прогоны готового дизайна.
Собрать робота в профессиональной лаборатории намного проще, хотя нужны определённые навыки. Это тип мастерской или лаборатории, скорее всего, будет необходим в небольшой компании по производству робототехники. Трудно описать все инструменты, необходимые на этом уровне, но можно дать некоторые общие рекомендации.
Как всегда, очень важно иметь правильный инструмент для правильной задачи, и только вы знаете свои потребности лучше всего.
Ниже вы найдете небольшой обзор инструментов и материалов для вашей мастерской, с классификацией по уровню и типу.
Механические инструменты
Минимальный набор может включать в себя:
— Маленькие отвертки, которые необходимы при работе с электроникой. Их нужно не очень много, но их размер делает их более хрупкими.
— Набор отверток. В любую мастерскую нужен набор инструментов или инструмента, который включает в себя плоские, крестообразные и другие головки отверток.
— Игольчатые плоскогубцы. Они бывают очень полезны при работе с небольшими компонентами и деталями и являются очень недорогим дополнением к вашему набору инструментов. Они отличаются от обычных плоскогубцев тем, что могут проникать в места недоступные стандартным плоскогубцам.— Стрипперы и кусачки для проволоки.
Если вы планируете обрезать провода различного диаметра, то кусачки помогут вам сэкономить много времени и усилий. Прибор для снятия изоляции (стриппер), при правильном использовании будет удалять только изоляцию с кабеля, и не будет перегибать или портить провода. Другой альтернативой устройству для снятия изоляции с проволоки является пара кусачек, но конечный результат может быть не очень хорошим.
Ножницы, линейка, ручка, маркерный карандаш, канцелярский нож (или другой ручной режущий инструмент) помогут собрать робота. Эти вещи необходимы в любом офисе.
Промежуточный набор может включать в себя:
— Вращающийся инструмент
- Ротационные инструменты оказались невероятно универсальными и могут заменить большинство обычных электроинструментов. Прежде всего при условии, что работа, которая должна быть выполнена, выполняется в небольших масштабах. Они могут резать, сверлить, шлифовать, гравировать, полировать и т. д.
- Дрель бывает очень полезна, особенно при создании больших отверстий или использовании более прочных или более толстых материалов. Более дорогой вариант, например сверлильный станок, позволит вам высверливать идеально перпендикулярные отверстия.
- Пилы различных типов необходимы, чтобы разрезать более толстые материалы или делать длинные прямые разрезы. Вы можете использовать ручную пилу, ленточную пилу, настольную пилу и т. д.
- Когда ваша работа становится более сложной, вам нужно будет надежно удерживать материалы и детали прочно на месте во время работы над ними. Следовательно необходимы тиски, которые позволяют добиться большей точности и качества изделия.
Профессиональный набор:
- Настольный станок с ЧПУ позволяет обрабатывать пластмассы, металлы и другие материалы и создавать трехмерные, сложные формы.
- Настольный токарный станок (ручной) позволяет создавать собственные валы, прокладки, адаптеры и колеса из различных материалов. Токарный станок с ЧПУ является избыточным, поскольку большинству конструкторов роботов нужно только изменить диаметр, а не создавать сложные формы.
- Вакуумные формовочные машины используются для создания сложных пластиковых оболочек, которые сформованы по вашим конкретным спецификациям.
- Листогибочные станки – нужны для создания роботизированных рамок или корпусов из листового металла. Они дают возможность получить точные и повторяемые изгибы.
- Другие специализированные инструменты. Когда вы более точно поймете, какая механическая обработка вам нужна, возможно, потребуются более специализированные инструменты. Это дополнительно набор инструментов по металлу, сварочные аппараты, 3D-принтеры и т. д.
Электрические инструменты
Минимальный набор:
— Беспаечная монтажная плата.
Эти платы используются для простого создания схем прототипов без необходимости пайки. Это хорошо в том случае, если вы еще не полностью освоили свои навыки пайки. Возможно вы хотите быстро собрать прототипы и протестировать идеи, не прибегая к пайке новой схемы каждый раз.
— Провода перемычки — идеально подходят для соединений между контактами на монтажной плате и не только выглядят красиво, но и предотвращают беспорядок.
— Блок питания макета. При экспериментировании с электроникой очень важно иметь надежный и простой в использовании источник питания.
— Набор для паяльного инструмента. В недорогой комплект паяльника входят все основные компоненты, необходимые, чтобы помочь вам припаять и создавать простые схемы.
— Мультиметр используется для измерения напряжения, сопротивления, тока, проверки целостности соединений и т. д. Если вы знаете, что будете создавать множество роботов и работать с электроникой, то разумно приобрести более качественный мультиметр.
— Настенный адаптер. Стандартные напряжения, используемые в робототехнике, включают: 3,3 В, 5 В, 6 В, 9 В, 12 В, 18 В и 24 В. Настенный адаптер также может быть хорошей заменой для батарей, так как они могут быть очень дорогими в долгосрочной перспективе. Настенный адаптер может позволить вам работать над вашим проектом без перерывов. Ведь даже перезаряжаемые батареи необходимо перезаряжать.
Промежуточный набор:
Промежуточный тип лаборатории базируется на основной лаборатории, добавляя следующее:
— Регулируемая температурная паяльная станция.
— Паяльник с переменной температурой со сменными наконечниками позволит вам быть более точным и снизить риск горения или плавления компонентов.
— Оплетка для снятия припоя или отсос помогут очистить наконечник паяльника, не охлаждая его, позволяя вам быстрее и качественнее паять.
— Переменный источник питания (вместо адаптера на стене). Наличие мощного и надежного источника питания очень важно при разработке сложных схем и роботов. Переменный источник питания позволяет вам тестировать различные напряжения и токи без хлопот. Прежде всего не требуется несколько типов батарей и силовых адаптеров.
Профессиональный набор дополнительно включает в себя:
— Осциллограф — очень полезен при работе с аналоговыми схемами или периодическими сигналами.
— Логический анализатор. Логический анализатор похож на осциллограф. Цель логического анализатора — запись цифрового (но не всегда только цифрового) сигнала с последующим его анализом в удобных программах. Он позволяет просматривать и хранить данные, получаемые с микроконтроллера, и упрощает отладку цифровых схем.
Дополнительно
— Наиболее распространенный диаметр провода, используемый в робототехнике, составляет 0,64 мм. Хотя у многожильных проводов есть свои преимущества, одножильный провод позволяет легко подключать их к штыревым разъемам и макетам.
— Набор для пайки с увеличительным стеклом, зажимами и держателем для паяльника.
Такой набор позволяет надежно фиксировать платы и детали во время пайки. Можно рассмотреть мелкие детали и оставлять паяльник в держателе, не опасаясь ожогов.
— Горячий клей и термоклеевый пистолет полезен независимо во многих случаях. Клей, который выходит из горячего пистолета, быстро застывает и обеспечивает хорошее склеивание различных компонентов.
В отличие от обычного клея, этот клей трехмерен, что означает, что вы можете использовать его в качестве разделителя, клея, наполнителя и т.д.
— Более толстые провода. Когда вы создаете более крупные роботы, двигатели постоянного тока потребуют более высоких токов и, следовательно, нужны кабели большего диаметра.
— Штангенциркуль цифровой позволяет более точно измерять детали, а также диаметры (как внутри, так и снаружи).
Программное обеспечение
Программное обеспечение для программирования.
Первое программное обеспечение для программирования должно соответствовать любому выбранному микроконтроллеру. Если вы выбрали микроконтроллер Arduino, то вы должны выбрать программное обеспечение Arduino. Программное обеспечение должно соответствовать выбранному микроконтроллеру.
Если вы выбрали линейку Lego, то вы должны выбрать программное обеспечение для Lego.
Чтобы использовать различные микроконтроллеры, вы можете изучить более фундаментальный язык программирования, такой как BASIC или C.
Схемы и печатные платы. На них я не буду подробно останавливаться. На рынке доступно множество популярных бесплатных программ. Они включают обширную библиотеку деталей и помогают преобразовать вашу схему в печатную плату.
Для профессиональных лабораторий существует множество платных программ САПР и 3-D моделирования, но это отдельная большая тема и ее лучше изучать отдельно, не в рамках этого обзора.
Источники
- https://Hi-News.ru/robots/kak-sozdayut-robota-kotoryj-zaxochet-izmenit-mir.html
- https://reobzor.ru/news/2021/01/sxemy-kak-sdelat-prostogo-robota-svoimi-rukami
- https://legoteacher.ru/10-pervyx-shagov/sobrat-robota/
- https://RobotPortal.ru/zanimatelnaya-robototehnika/kak-sdelat-robota-samostoyatelno
- https://www.techcult.ru/robots/1492-kak-sdelat-robota-svoimi-rukami
- https://Hi-News.ru/technology/kak-sdelat-robota-svoimi-rukami-v-domashnix-usloviyax.html
- https://knife.media/how-to-assemble-a-robot/
- https://podelunchik.ru/podelka-robot
- https://gidrukodeliya.ru/podelka-robot

Задать вопрос